Woher kommt Laser Scanning? Wer hat es erfunden?
Wie wurde Laser Scanning in den vergangenen Jahrzehnten bis zum heutigen Tag eingesetzt?
Unsere Reihe „The origins of laser scanning“ geht diesen Fragen auf den Grund und liefert Antworten zu dieser spannenden Technologie, die inzwischen kaum noch aus unserem Alltag wegzudenken ist.
Technologische Reife ab 2005
Ab Mitte der 2000er kommen Scanner mit integrierten Kompensatoren auf den Markt. Diese gleichen Neigungen automatisch aus und erhöhen die Messgenauigkeit deutlich. Vorreiter sind Hersteller wie Leica Geosystems und Trimble.
Vom Spezialgerät zum Standardwerkzeug
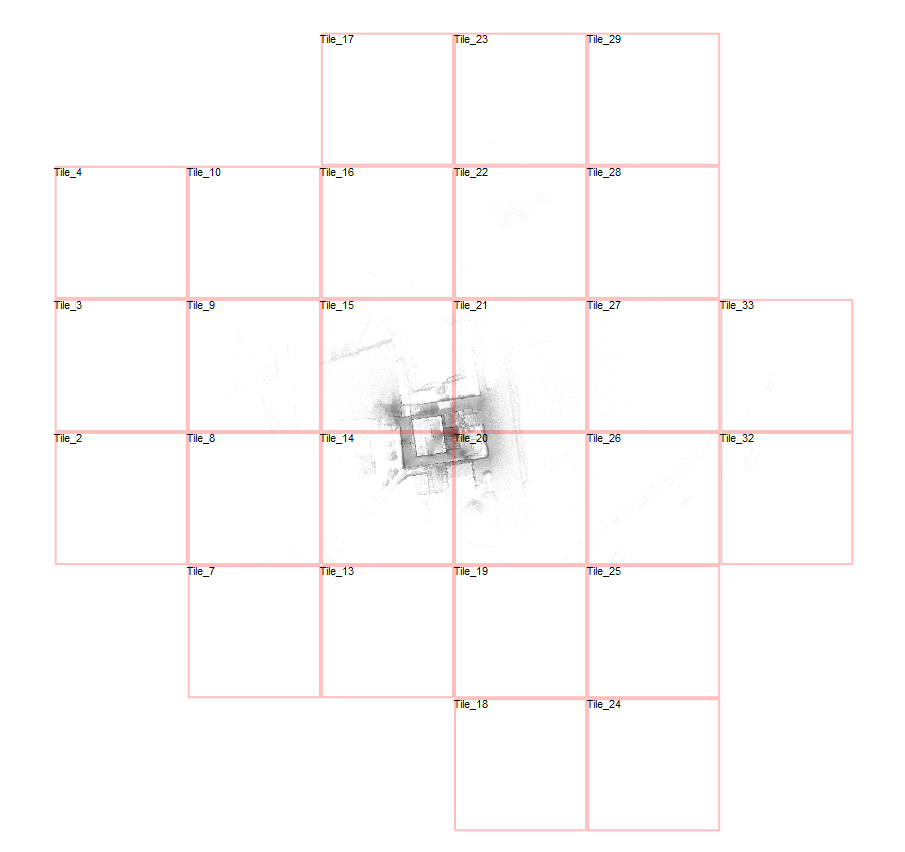
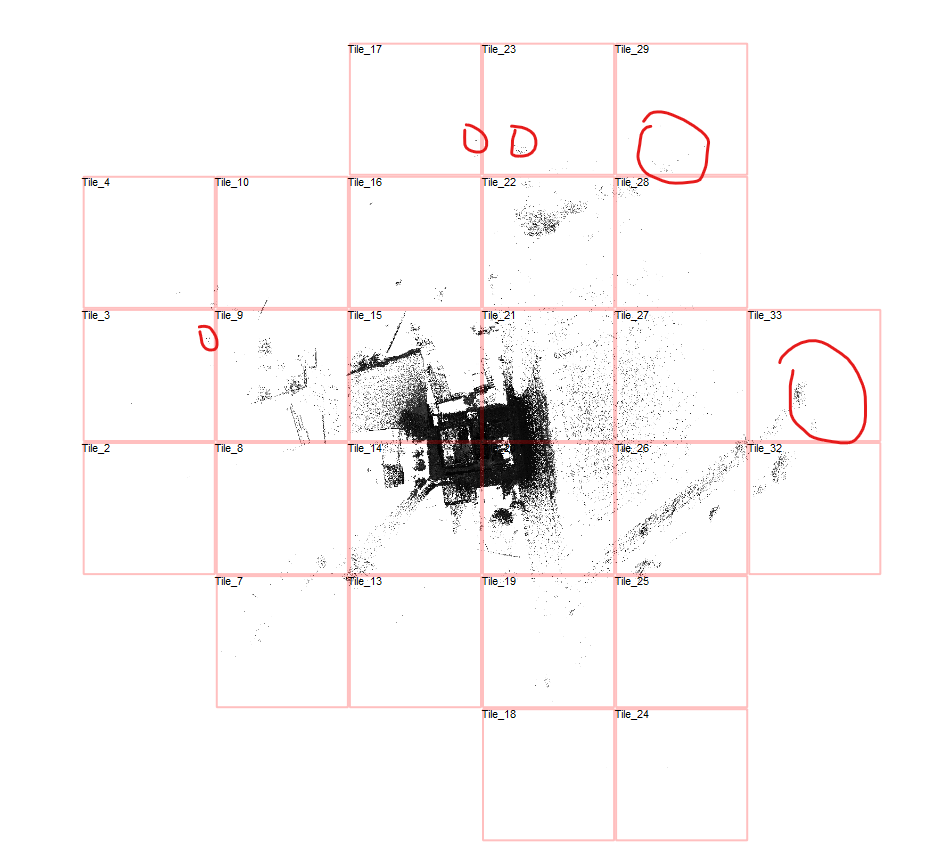
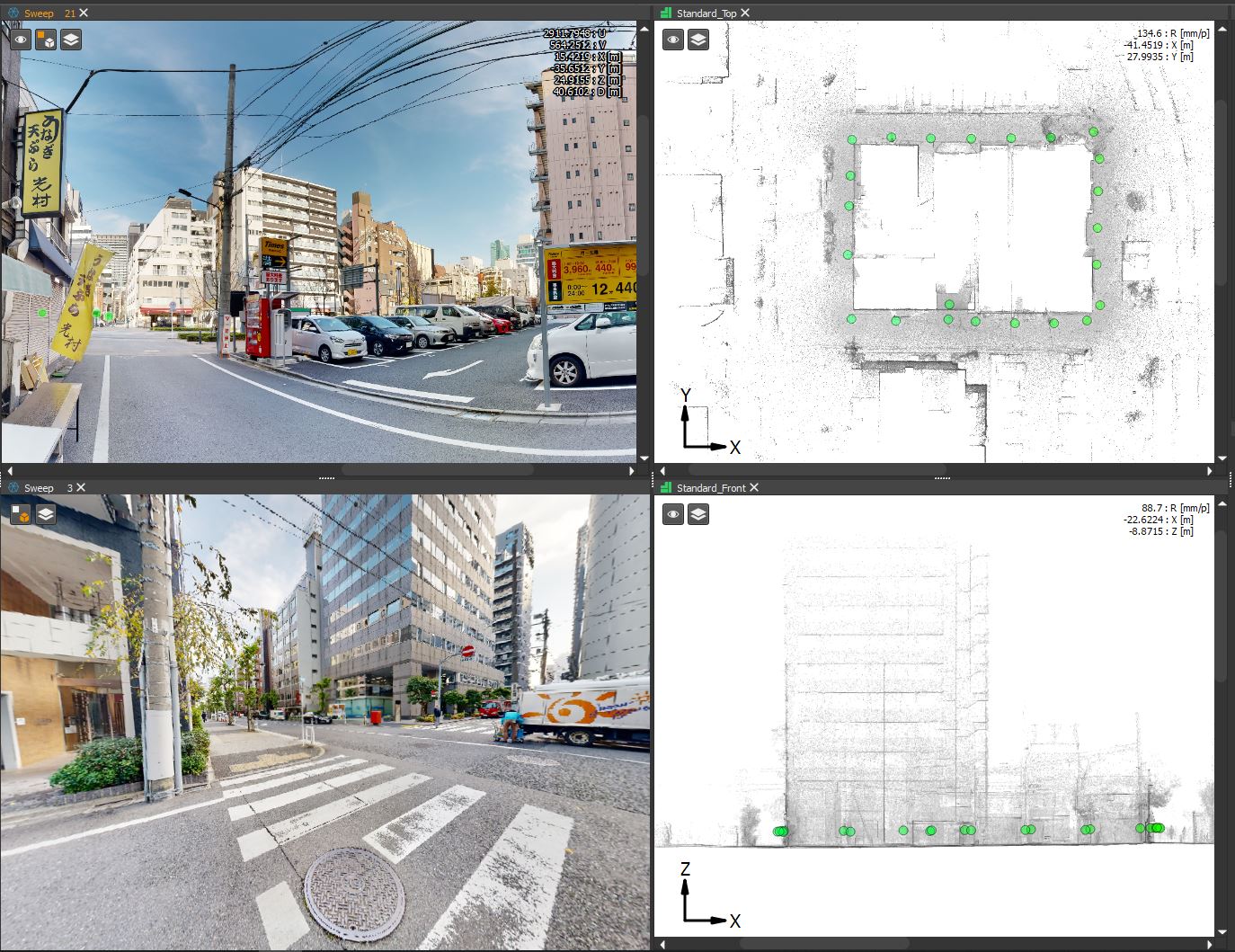
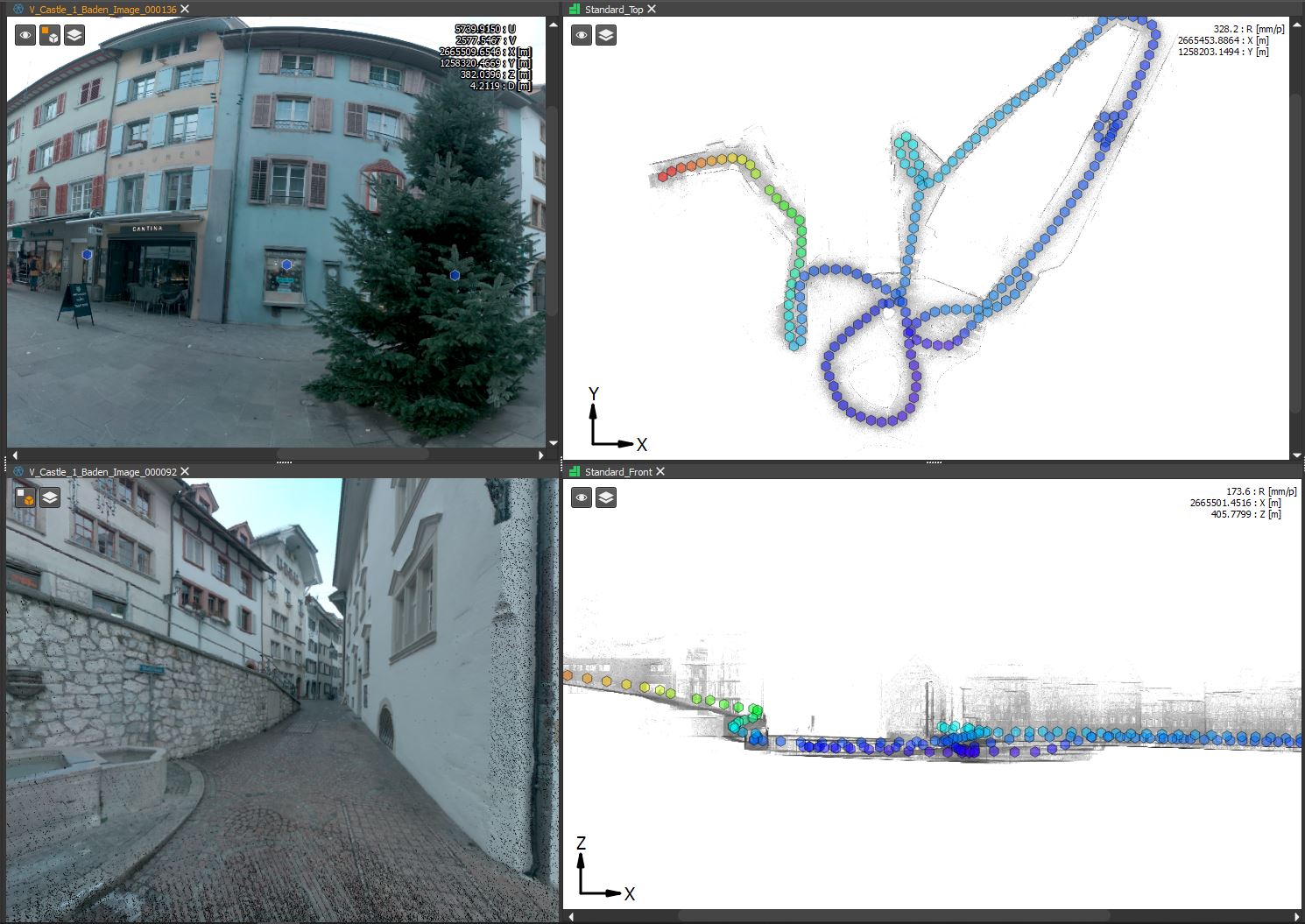
Heute ist 3D-Laserscanning fester Bestandteil im Bauwesen, in der Industrie und in der Denkmalpflege. Mit stationären, mobilen oder Drohnen-basierten Systemen lassen sich Gebäude, Anlagen und ganze Städte dreidimensional erfassen.
BIM und digitale Workflows
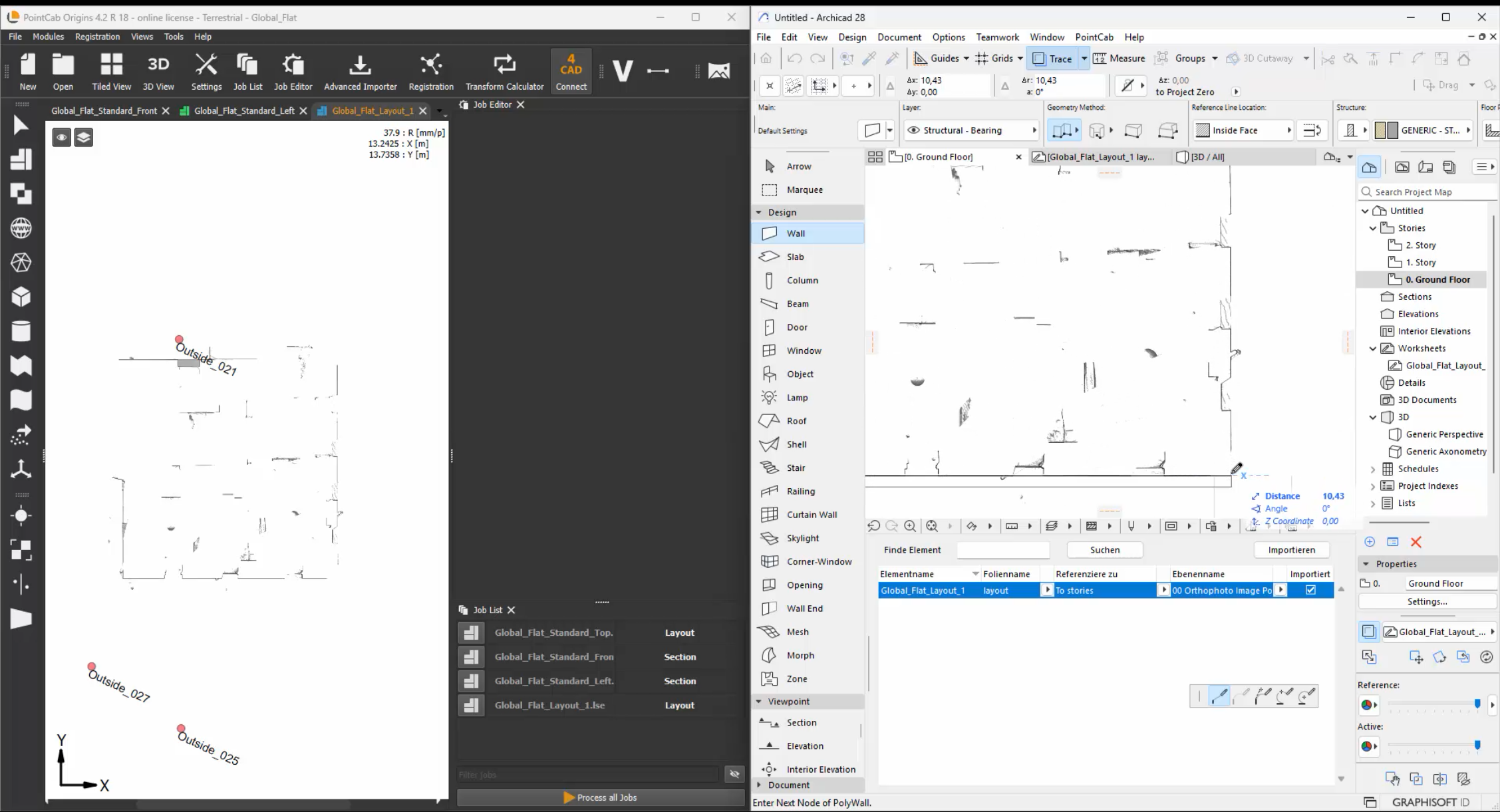
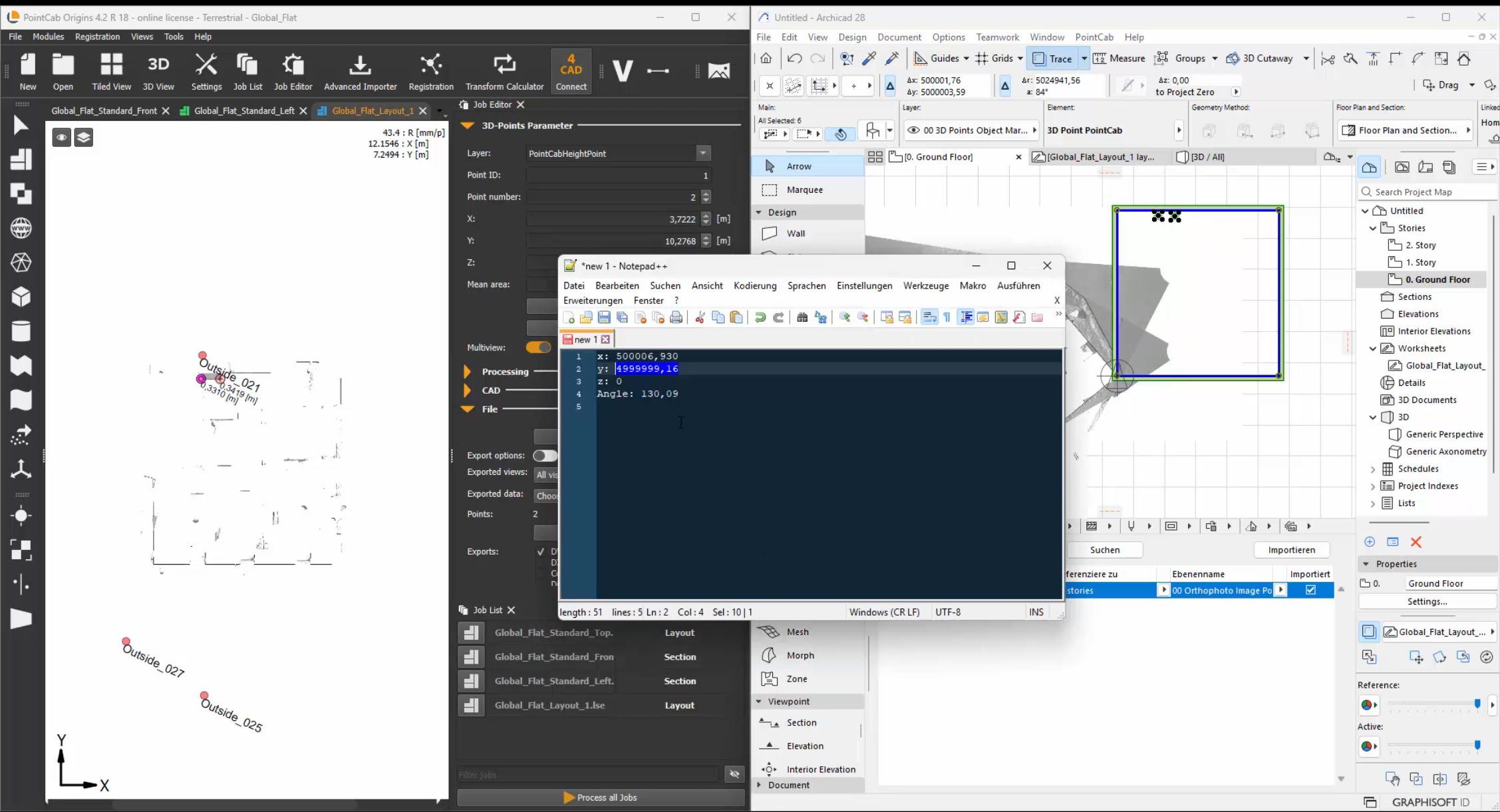
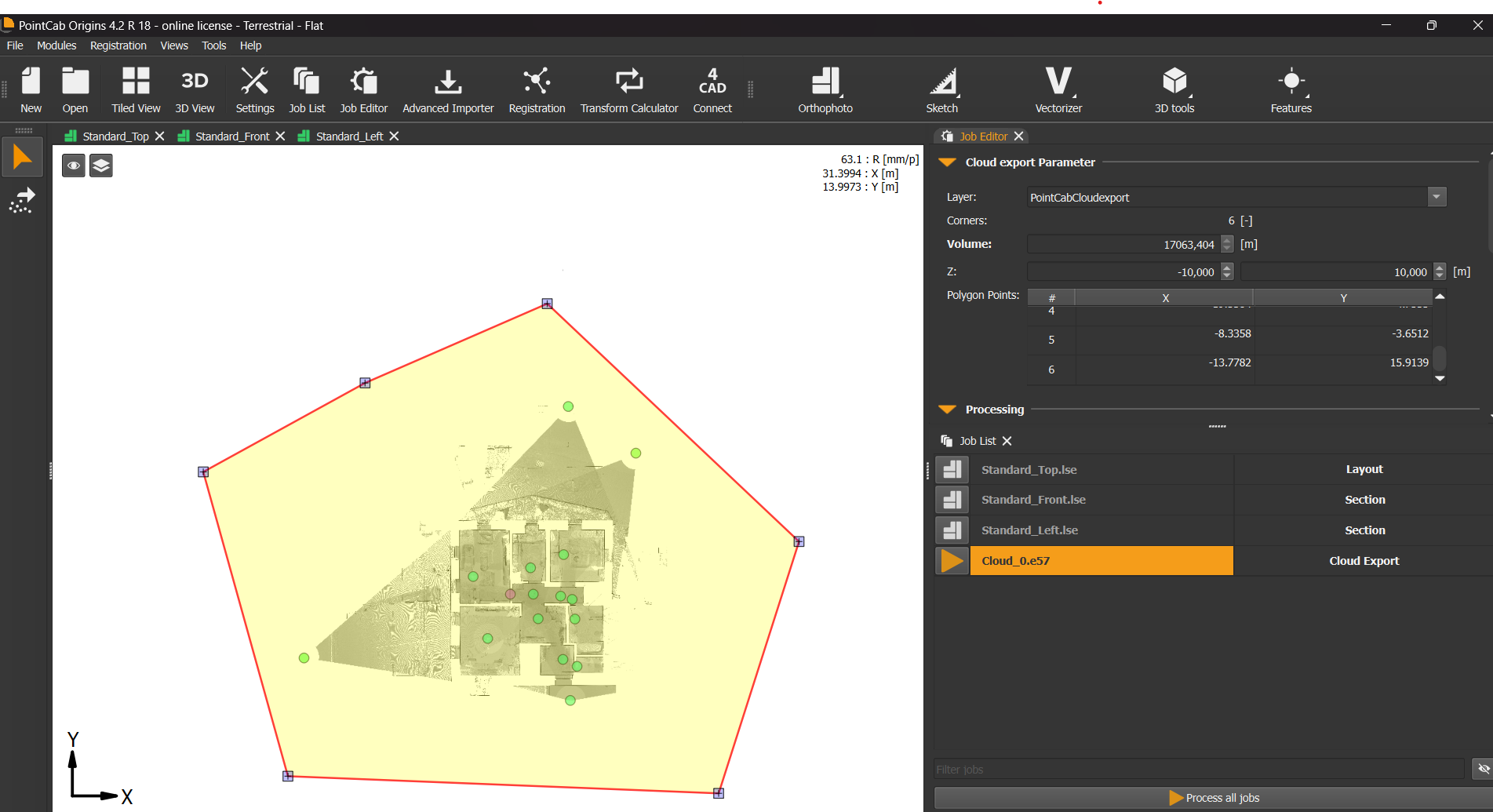
Die erfassten Punktwolken fließen direkt in CAD- und BIM-Systeme ein. Häufig übernehmen KI-gestützte Verfahren die automatische Modellgenerierung und Analyse. Das spart Zeit und reduziert Fehler.
BIM – Building Information Modeling
BIM ist eine Arbeitsmethode, bei der alle relevanten Gebäudedaten digital erfasst, kombiniert und vernetzt werden. Laserscanning liefert die präzisen Geometriedaten, die als Grundlage für die digitale Planung dienen.
Vielfältige Anwendungen

- Architektur & Bestandserfassung
- Reverse Engineering & Qualitätssicherung
- Umwelt- und Klimaforschung
(z. B. Gletscherbeobachtung, Küstenveränderungen) - Sicherheits- und Überwachungstechnik
- Verkehrs- und Stadtplanung
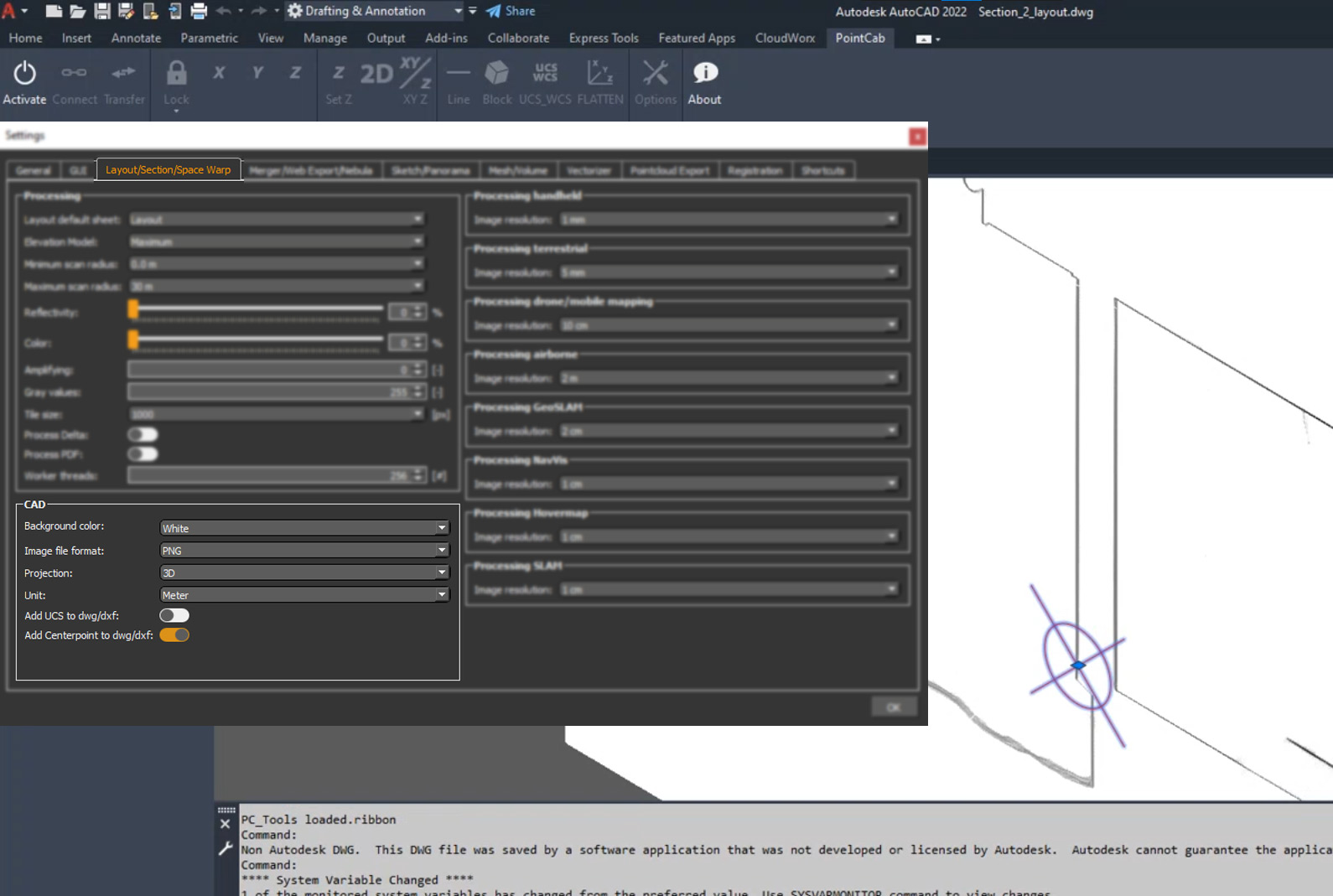
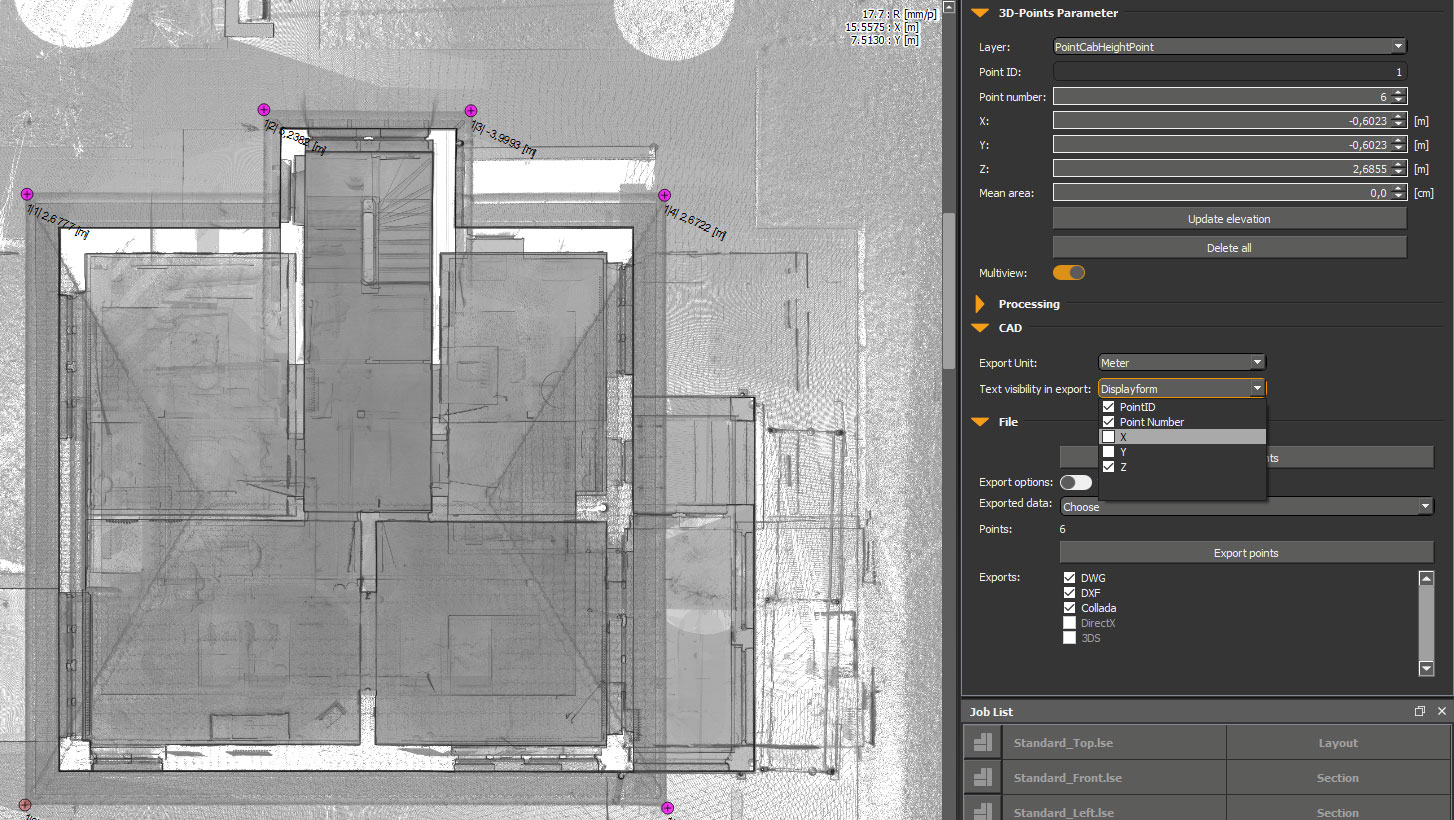
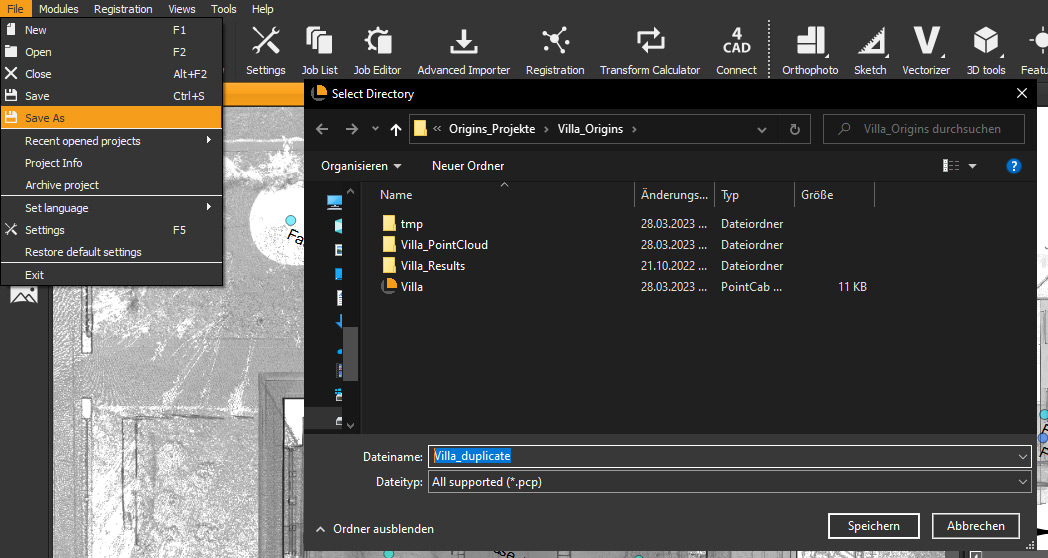
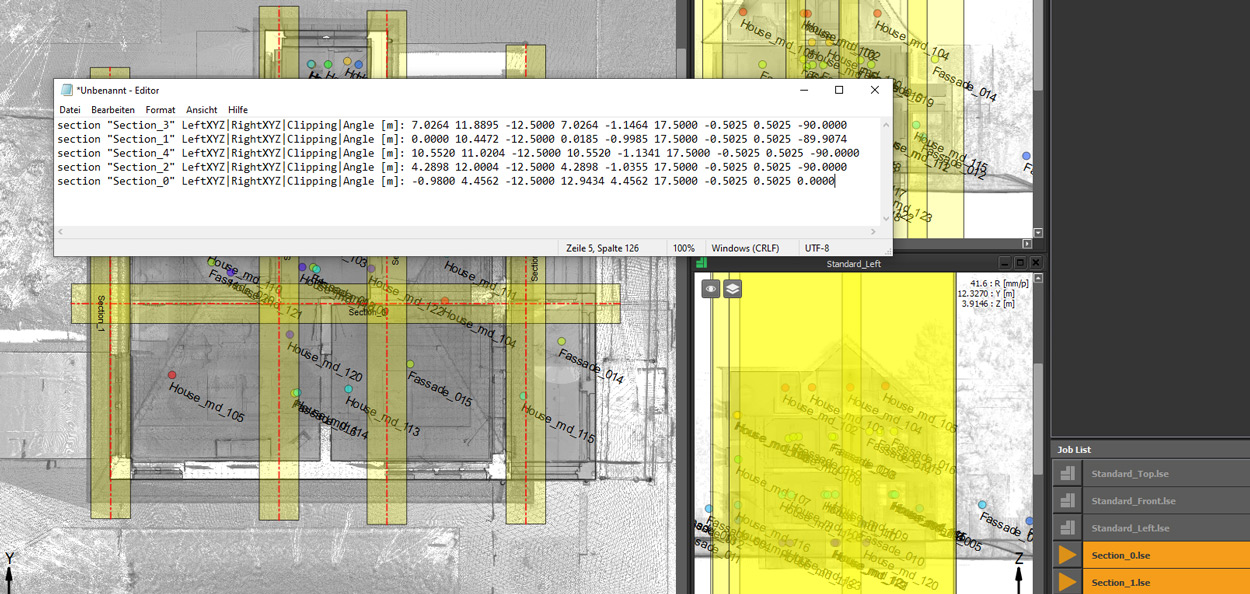
Software als Schlüssel
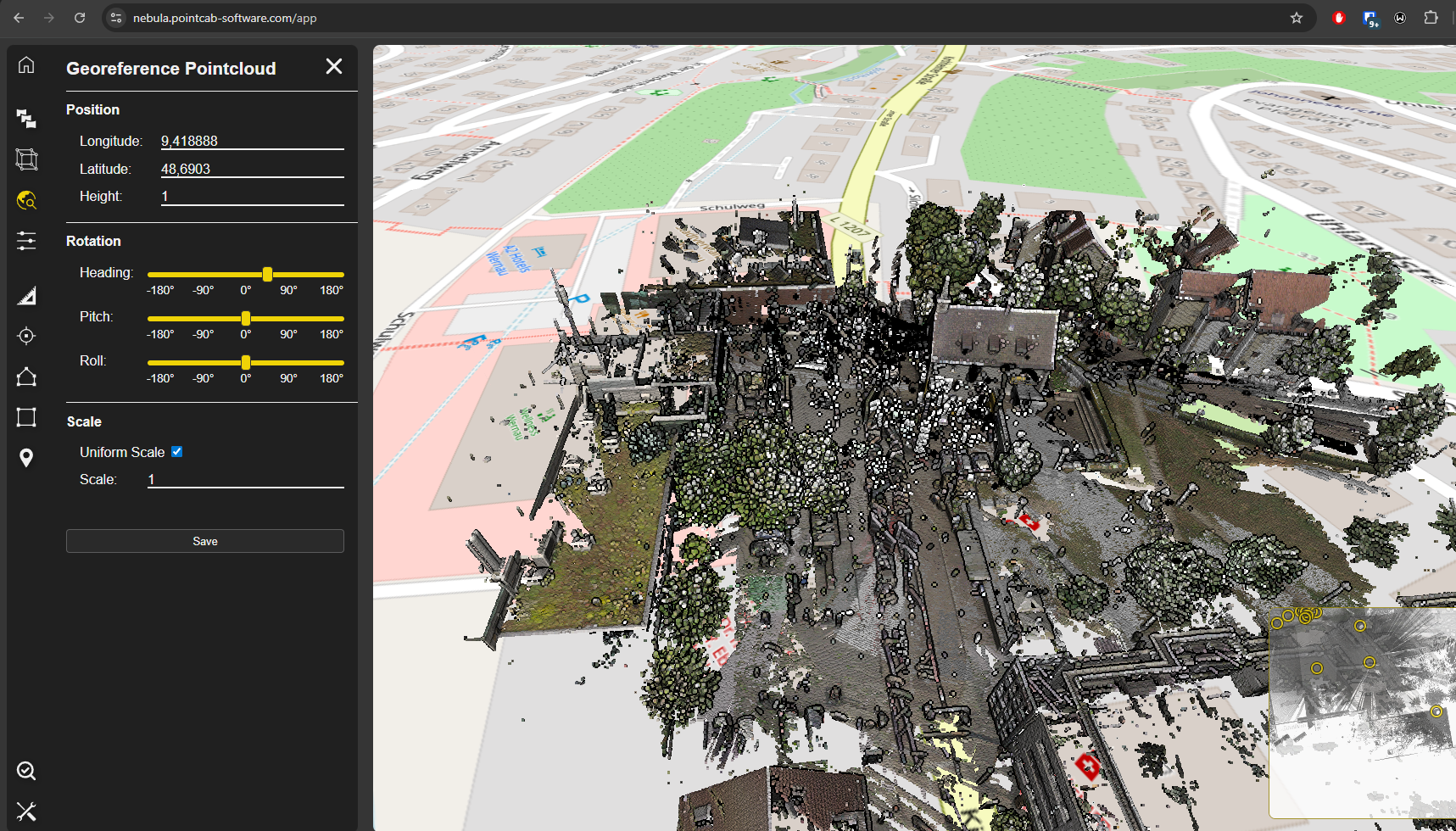
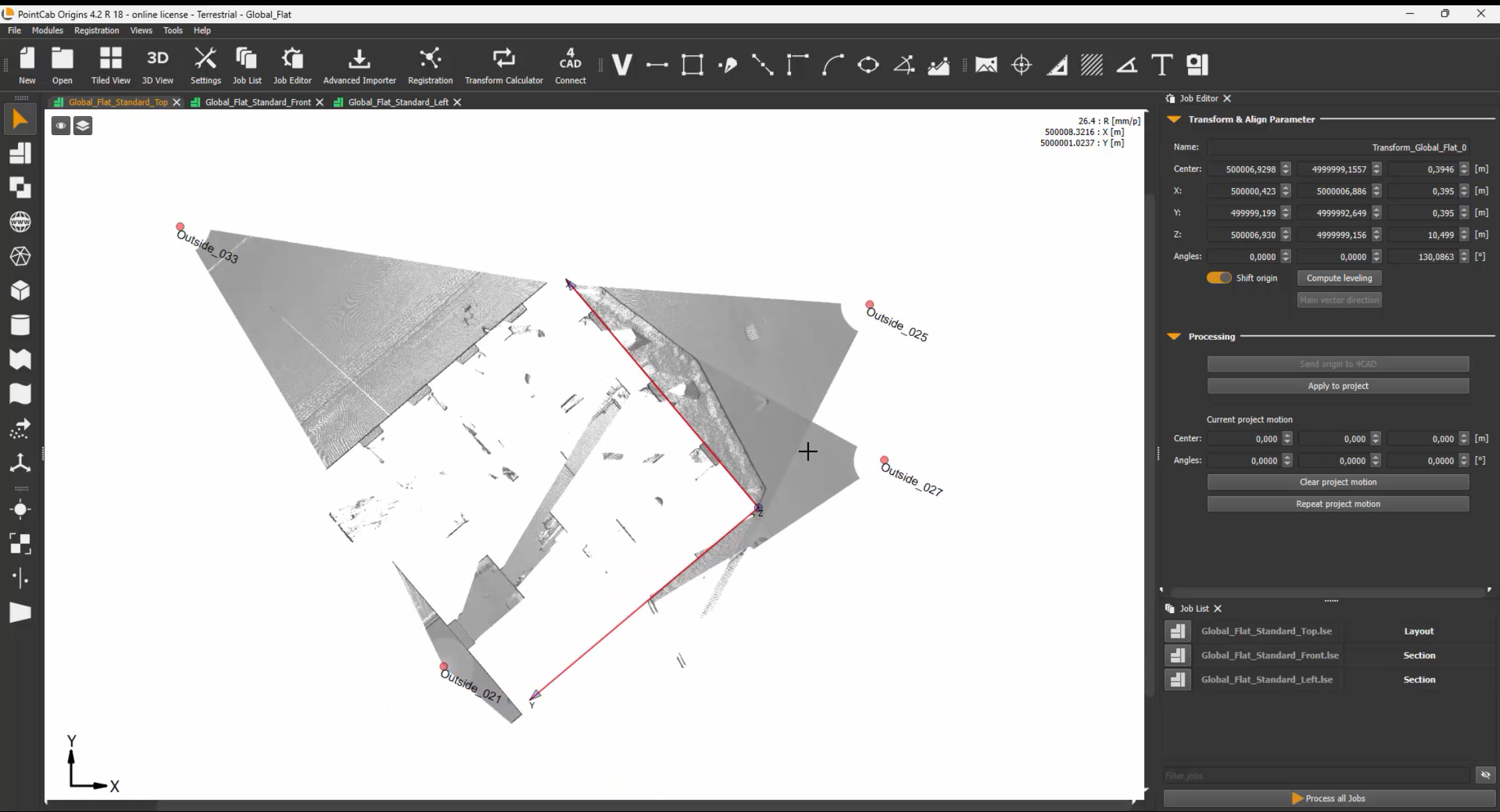
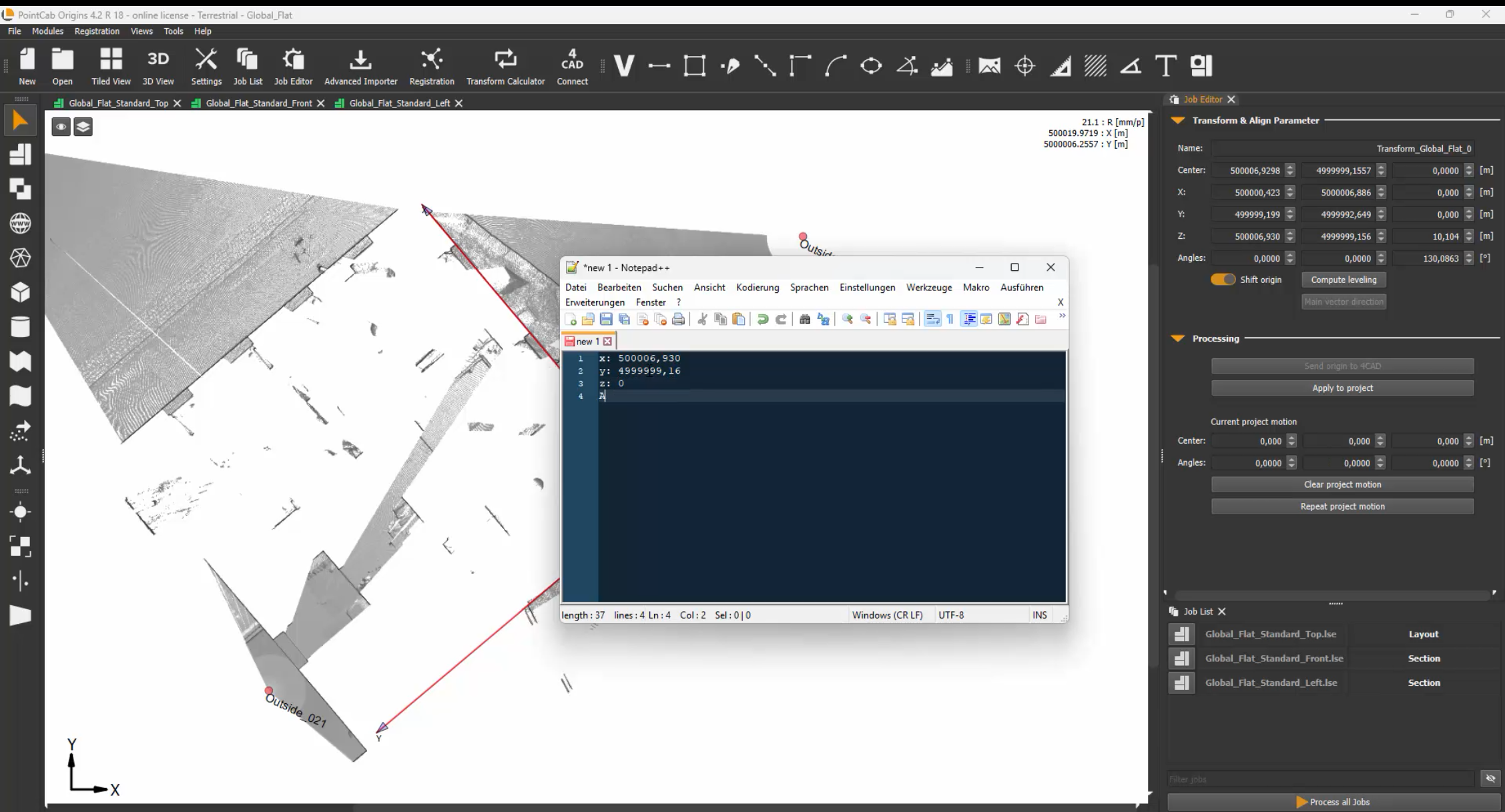
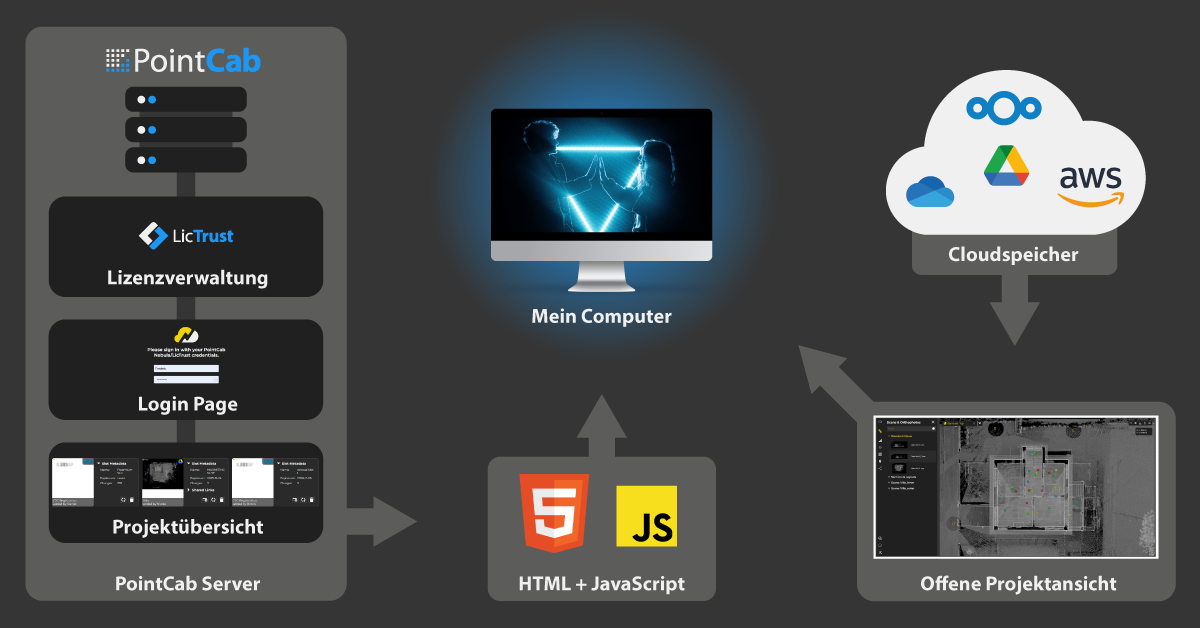
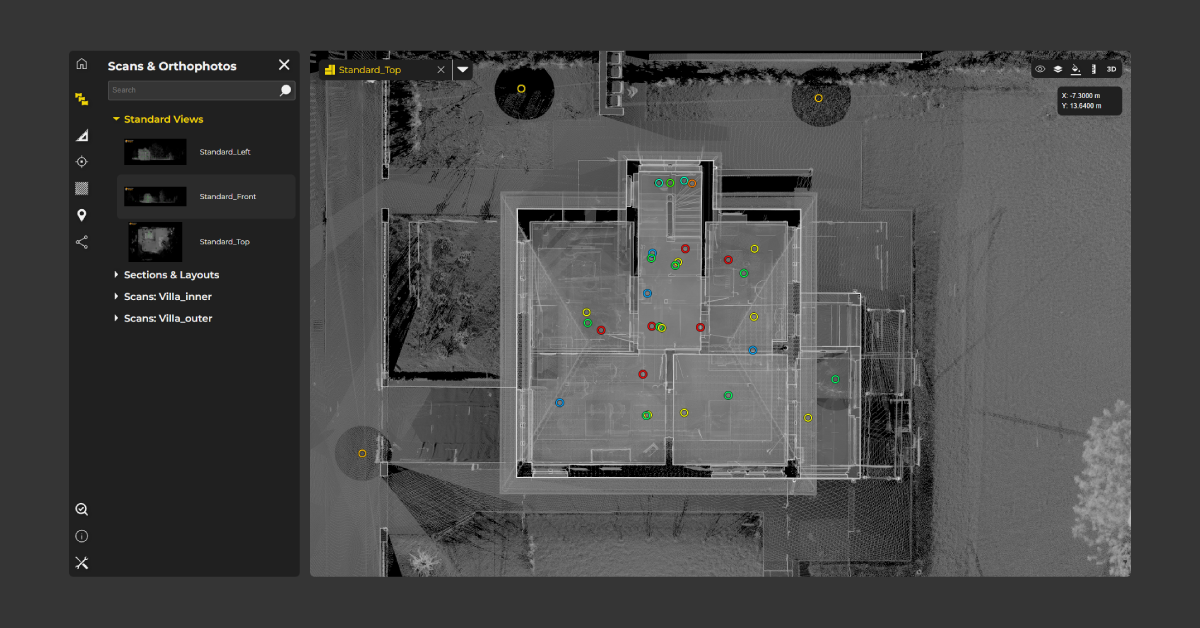
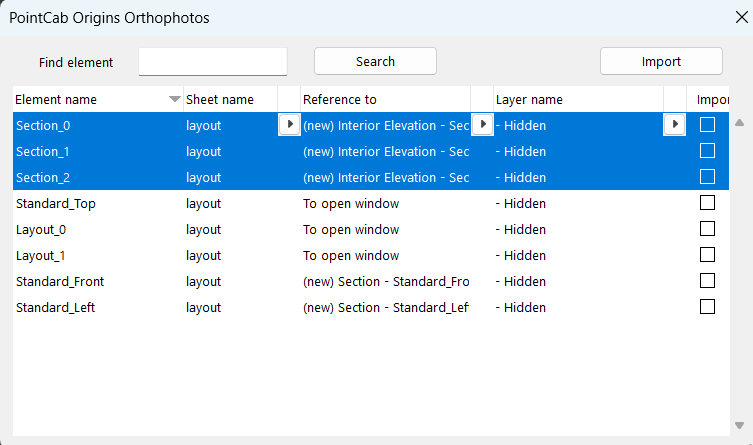
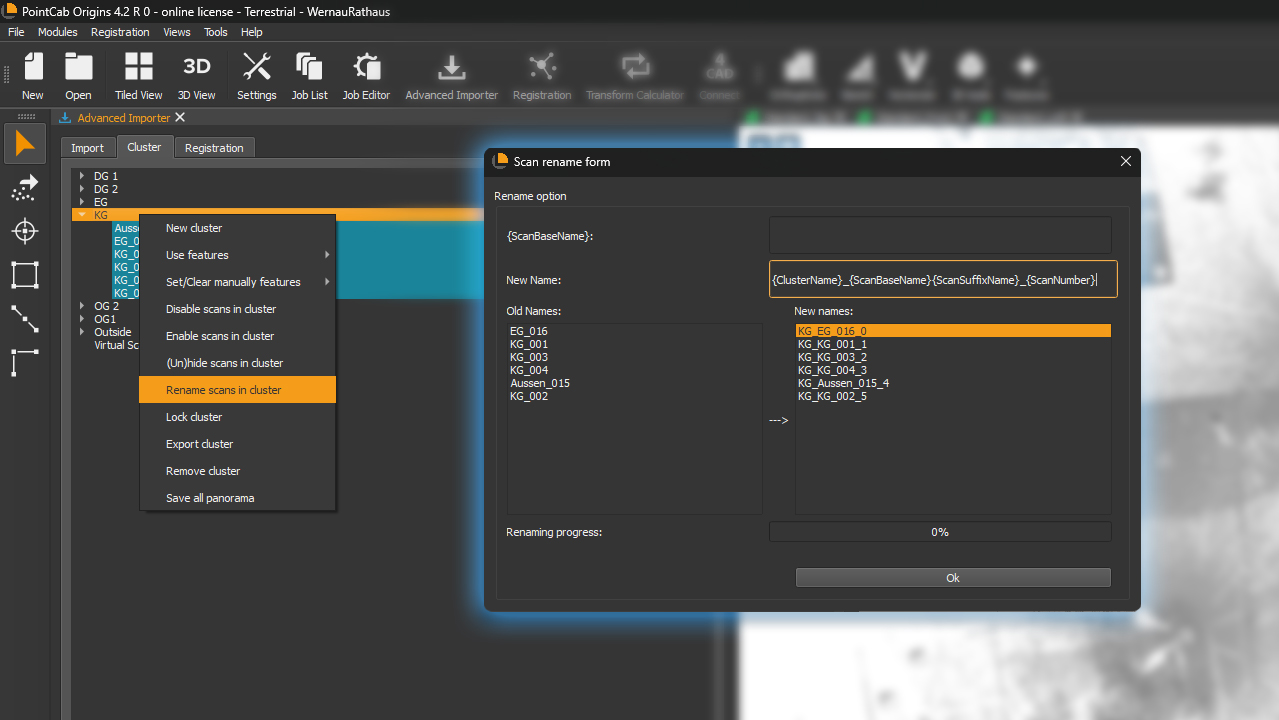
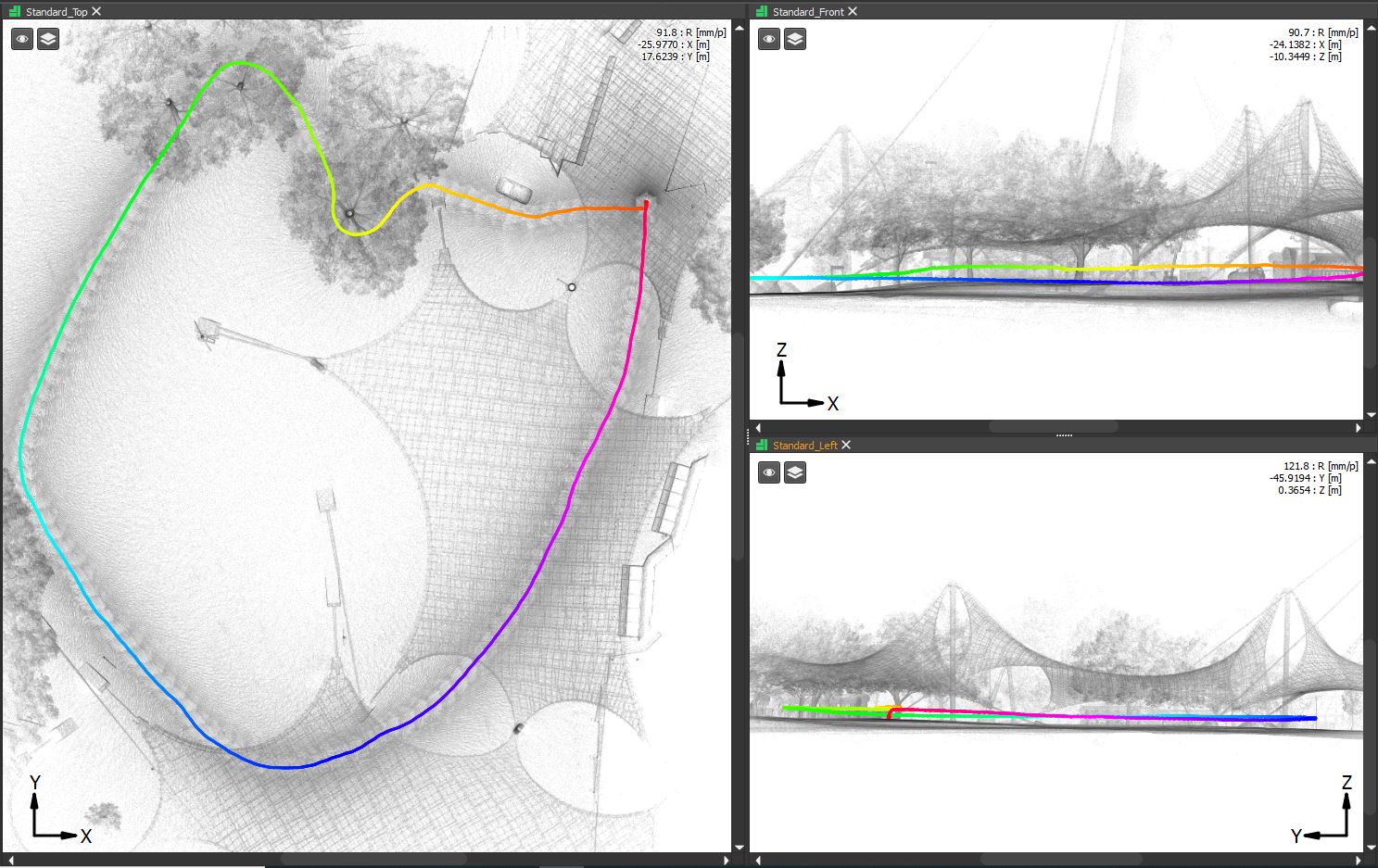
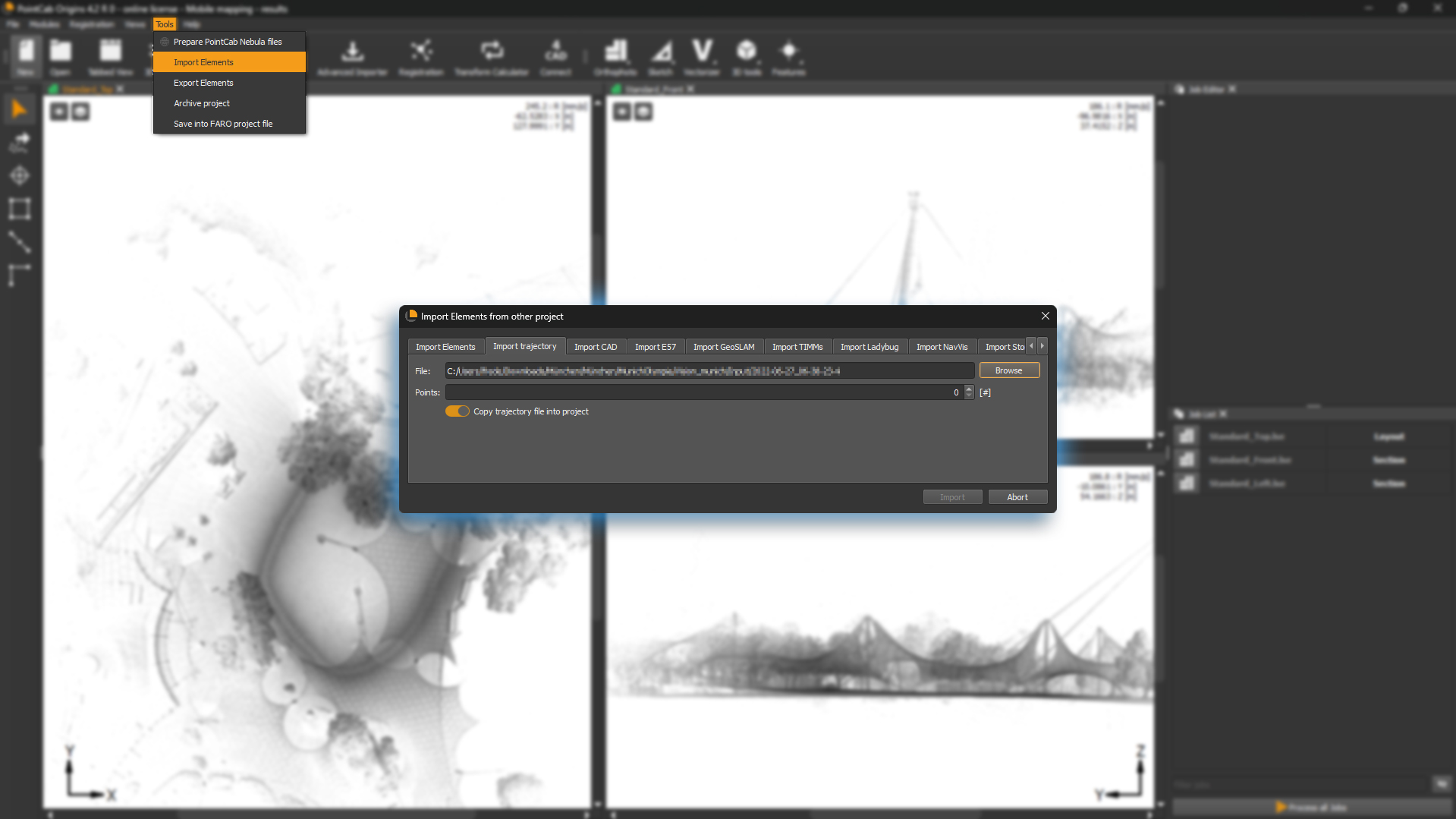
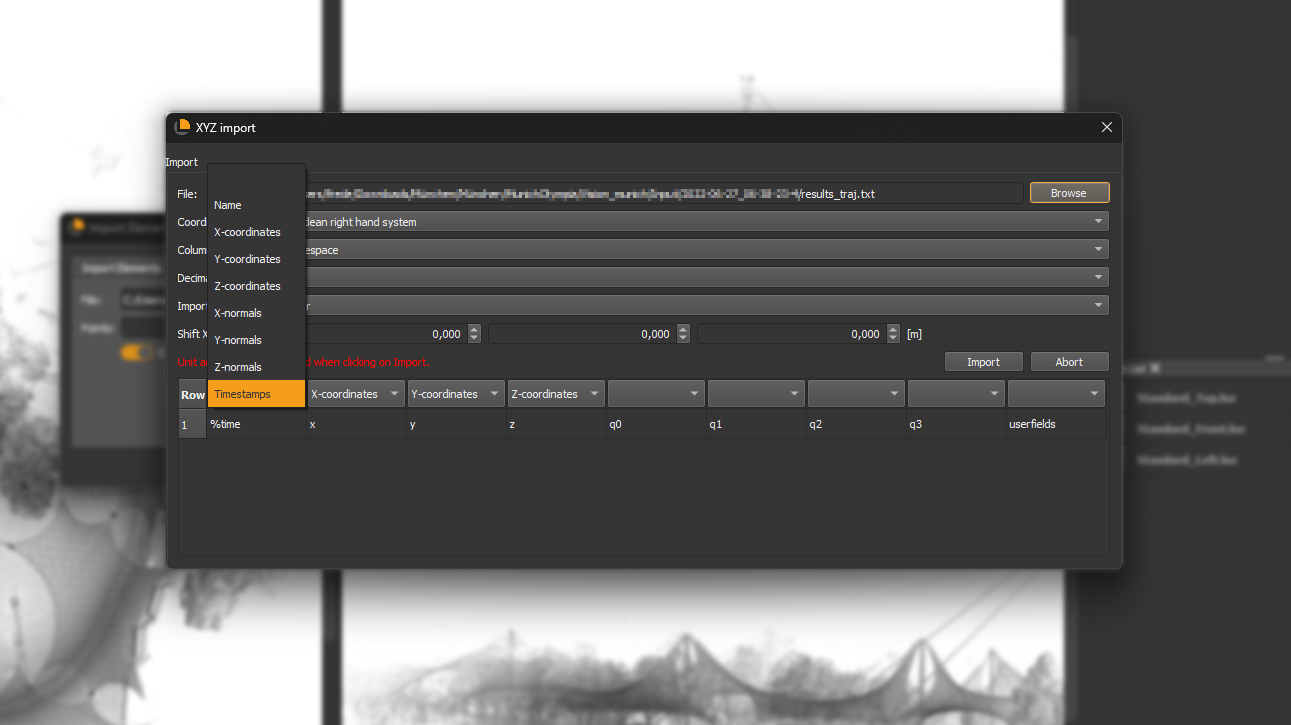
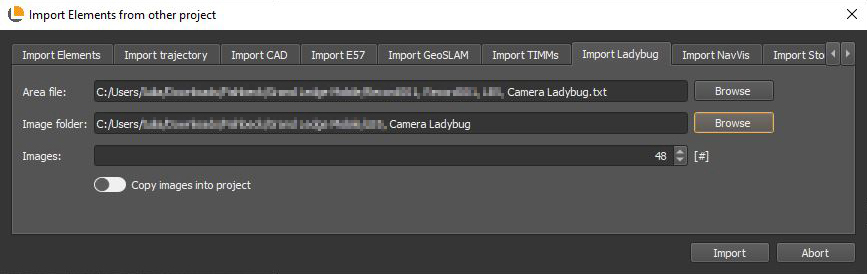
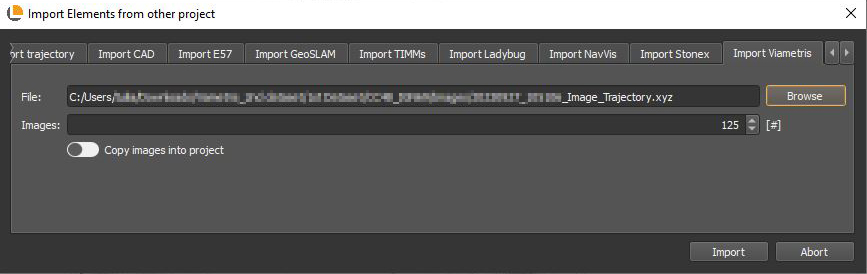
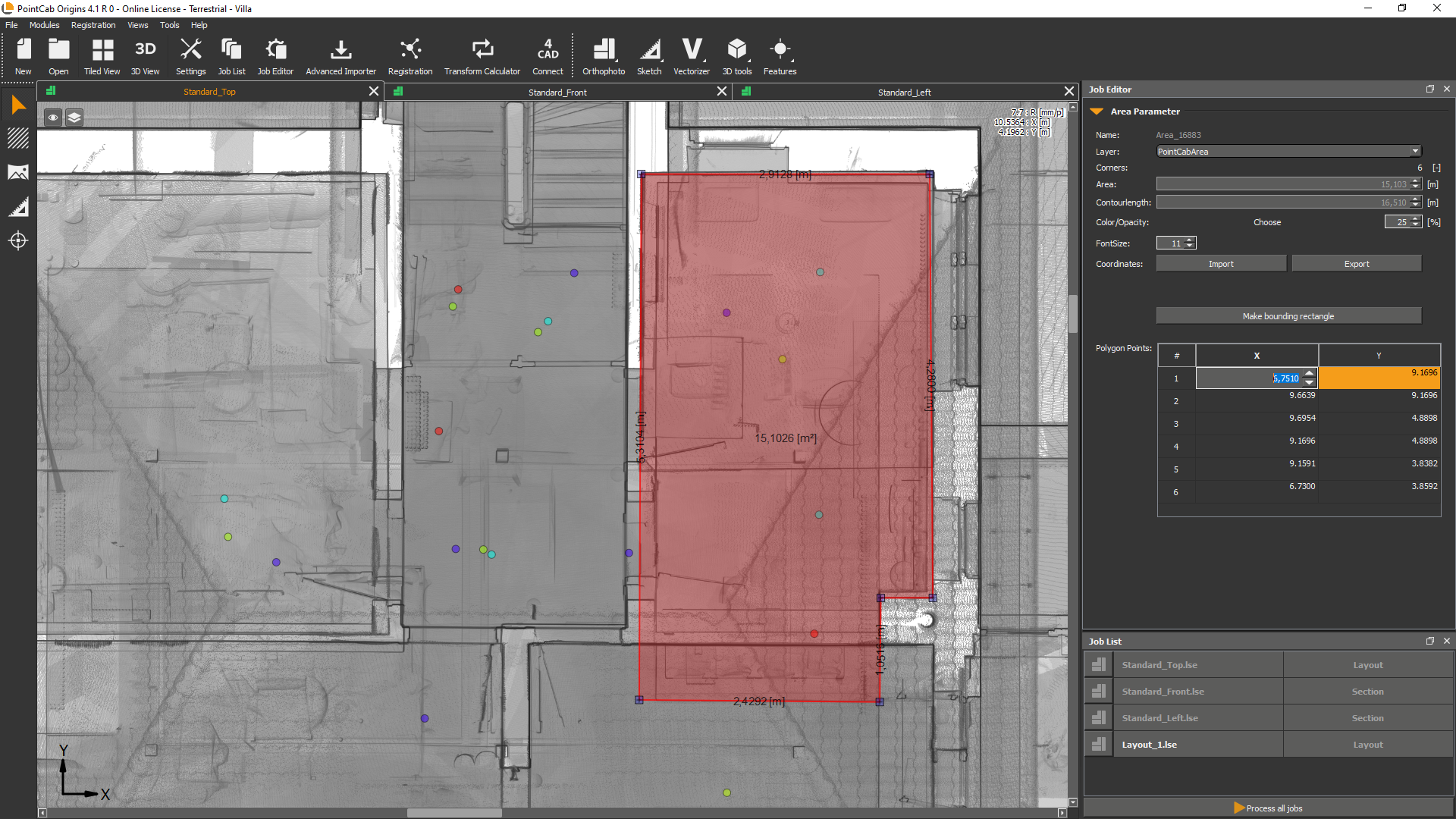
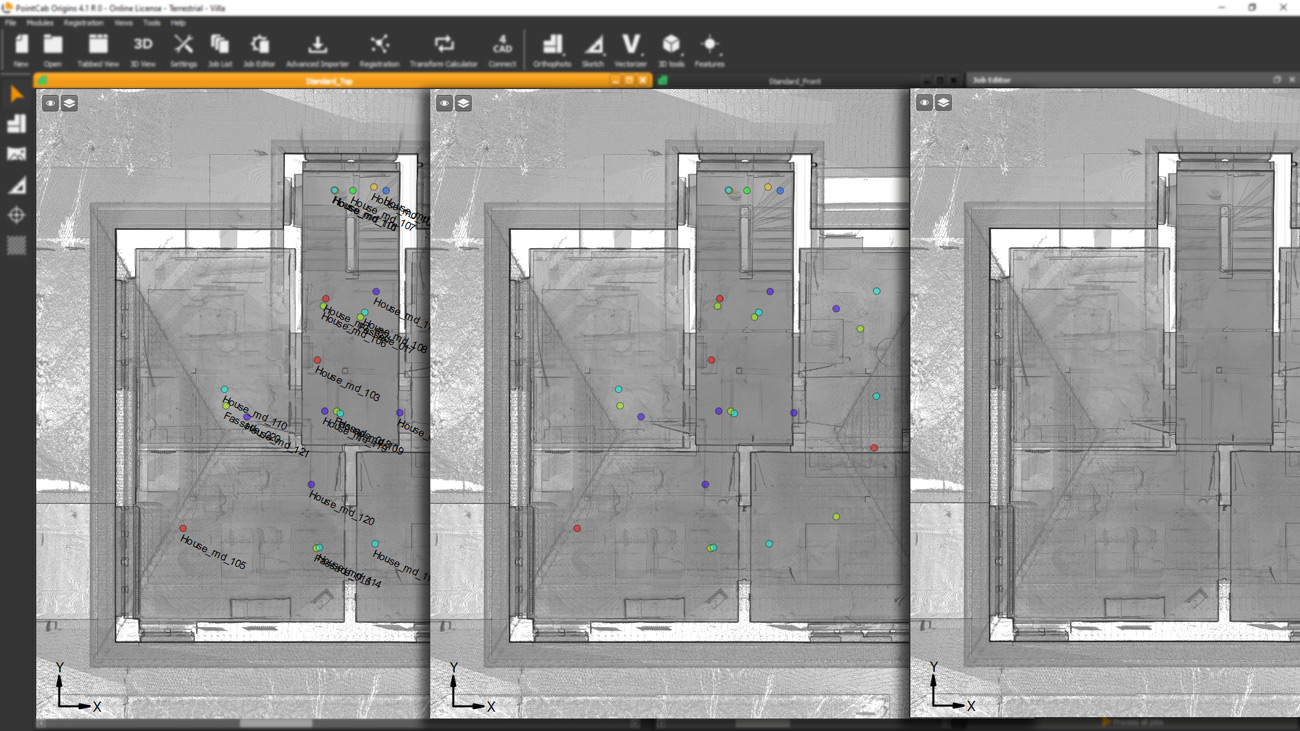
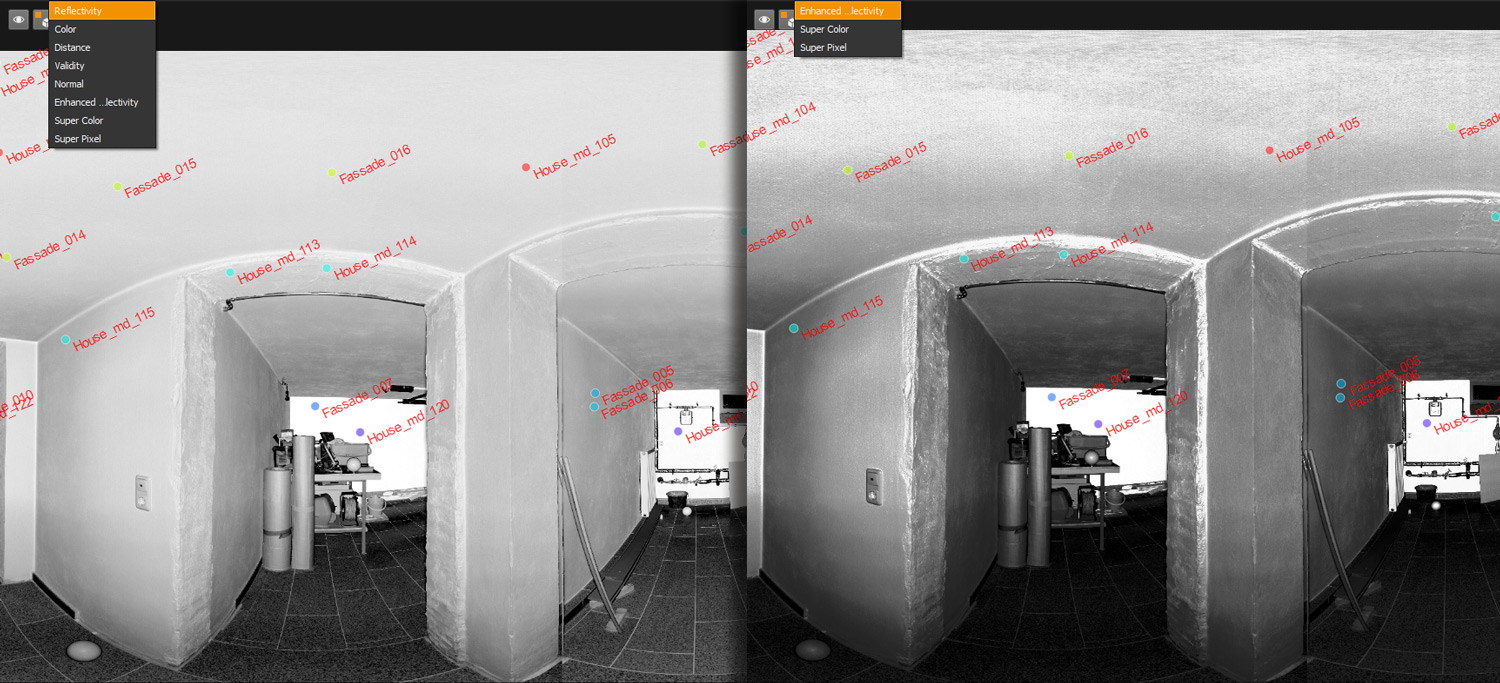
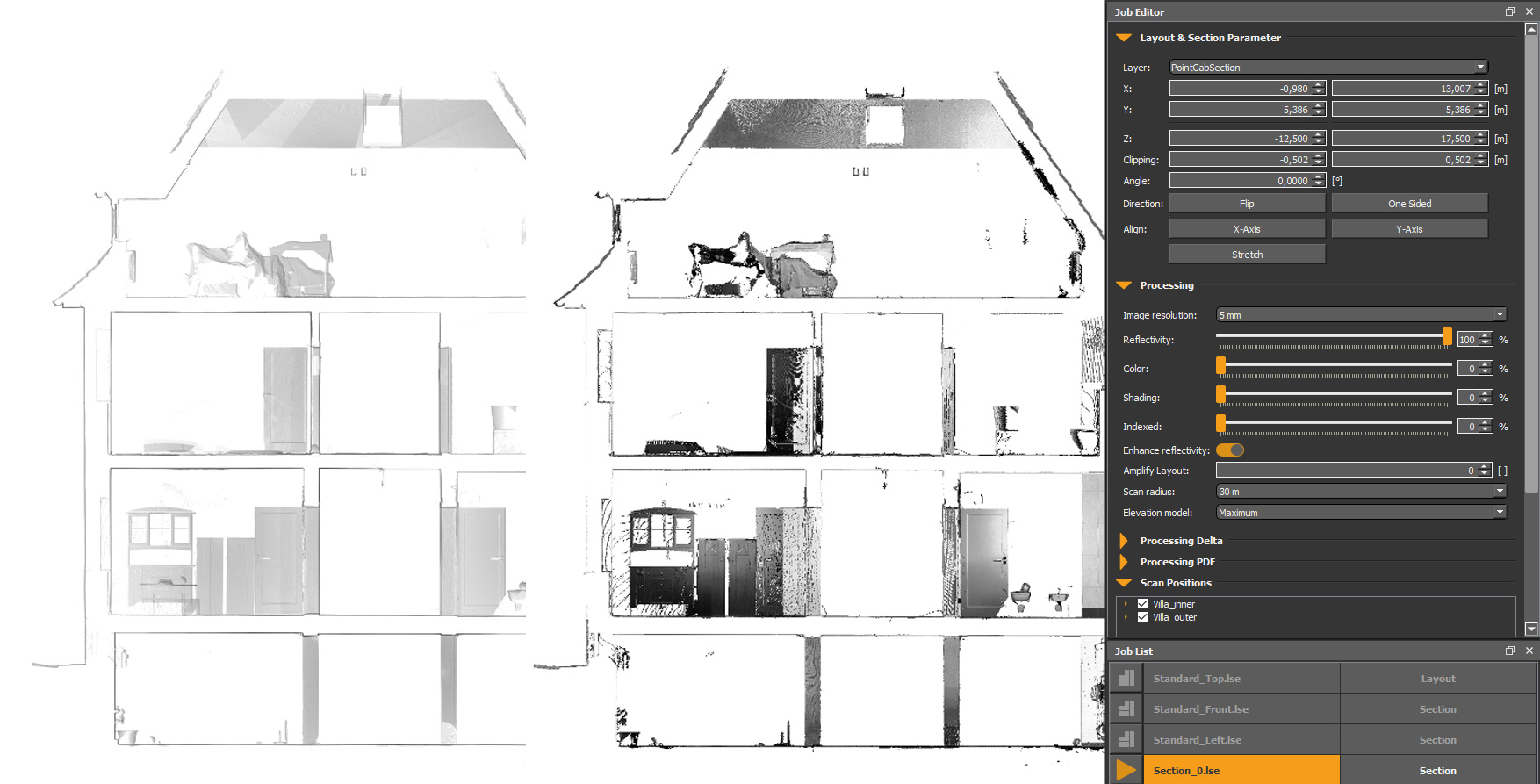
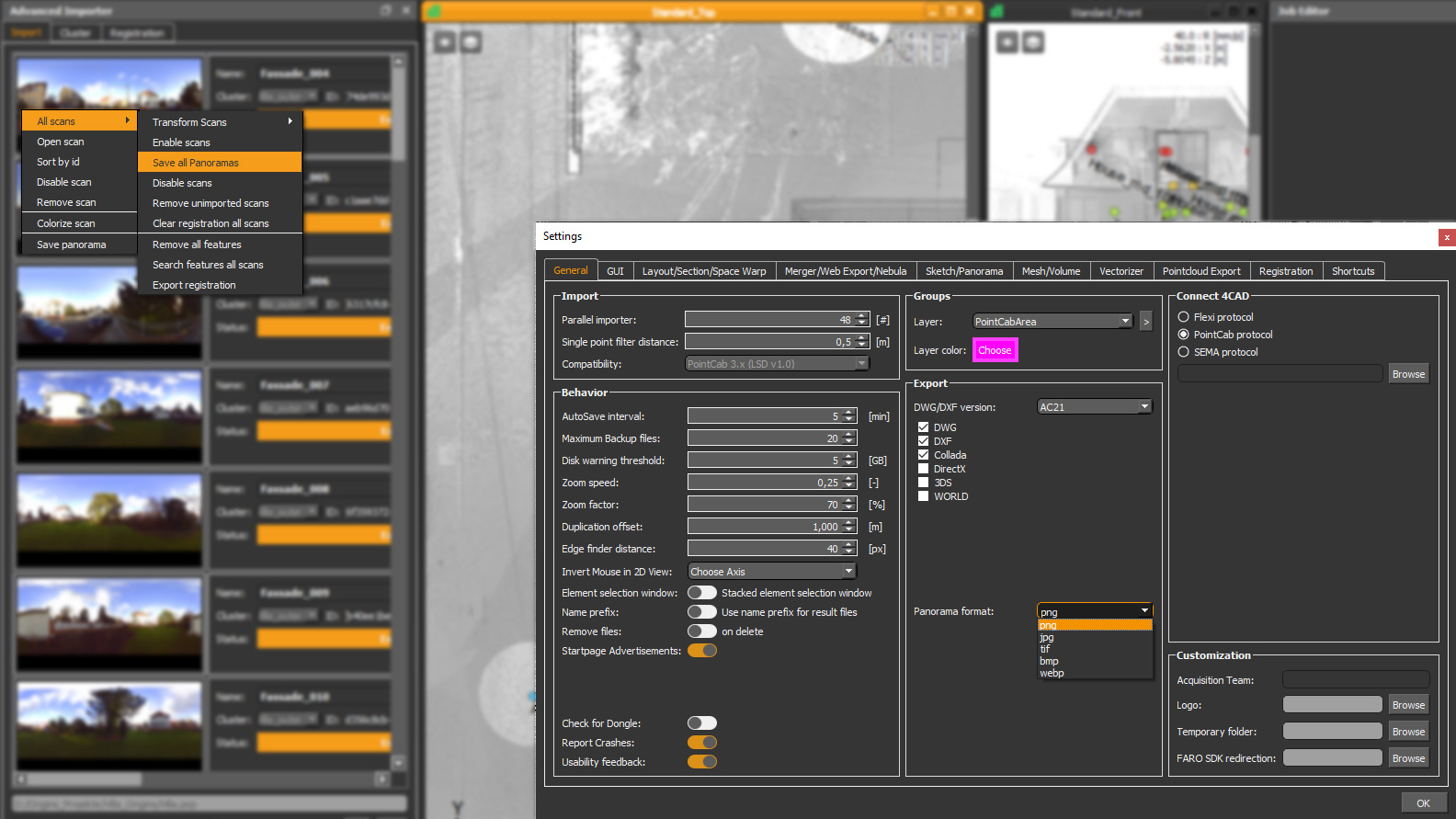
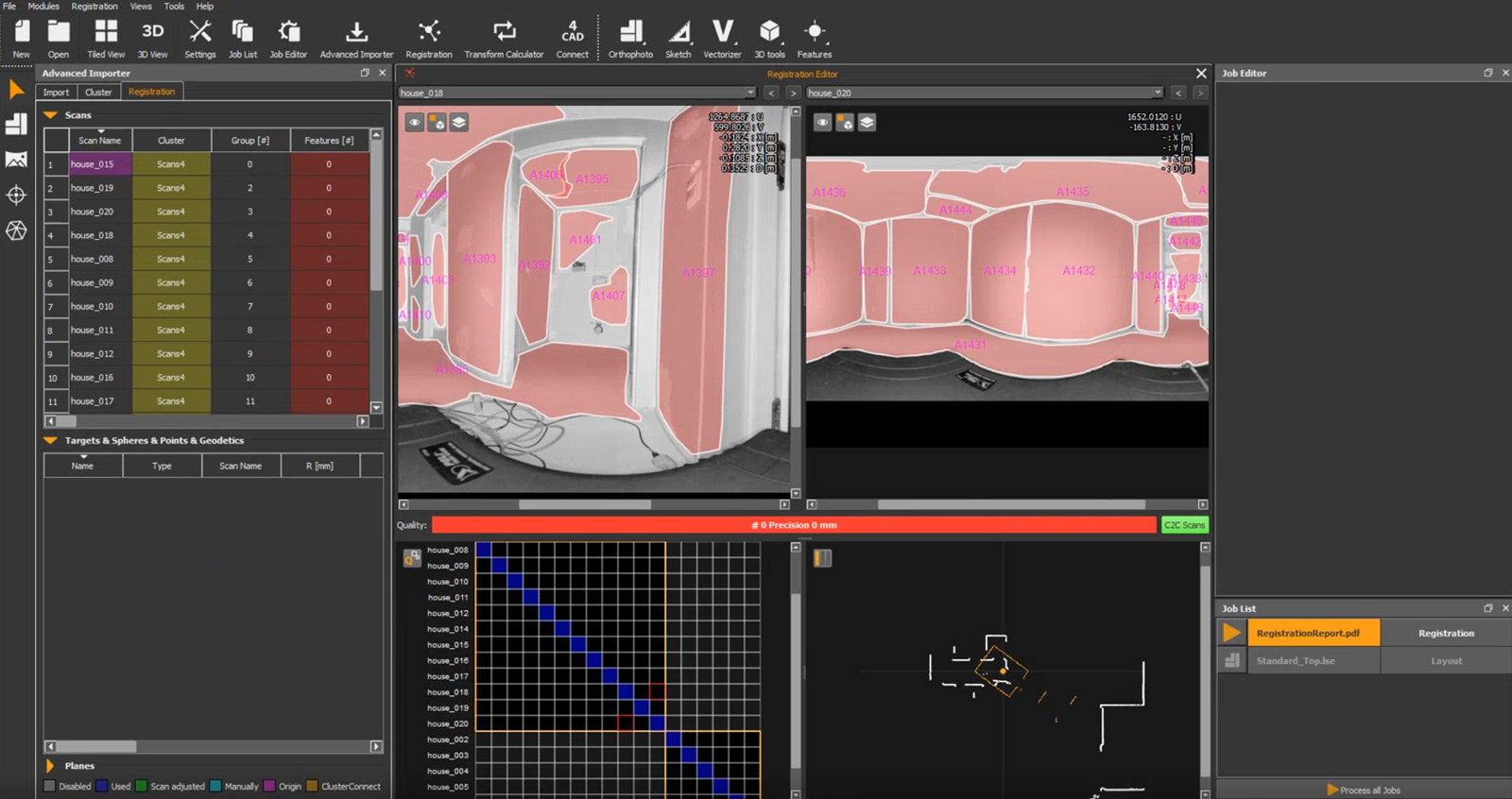
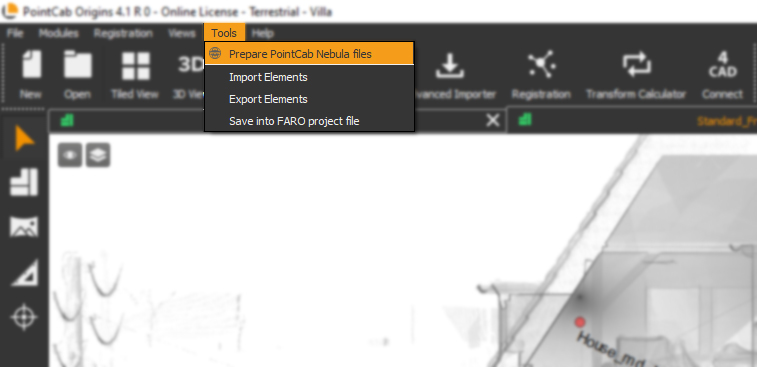
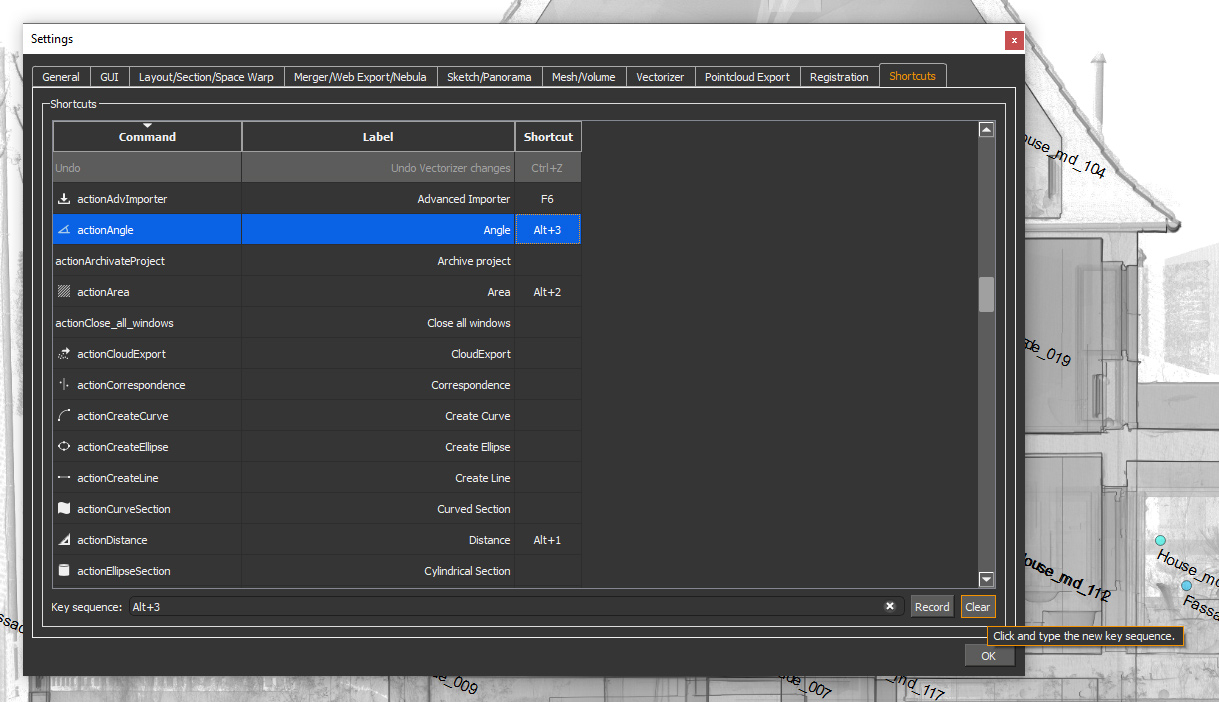
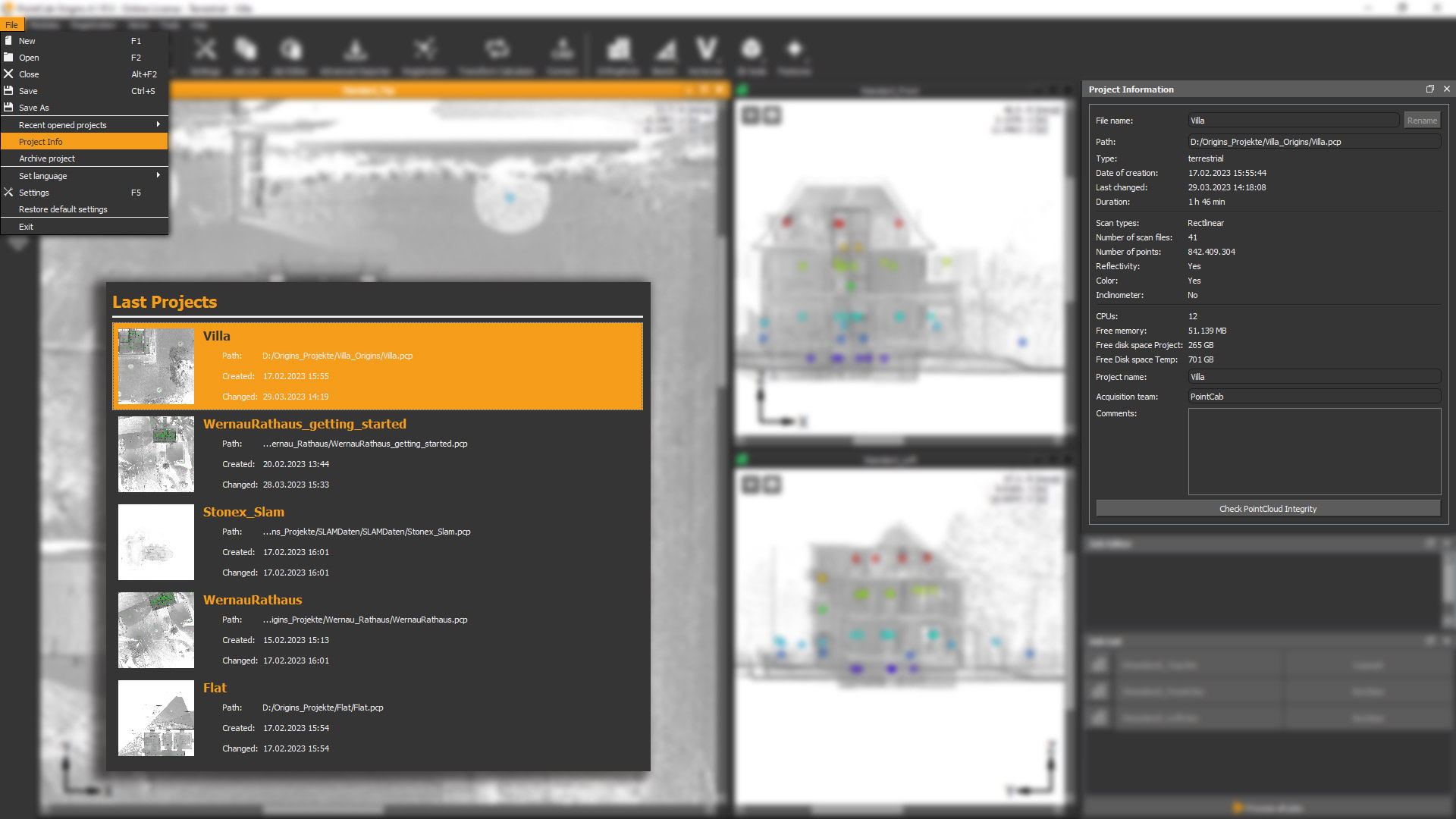
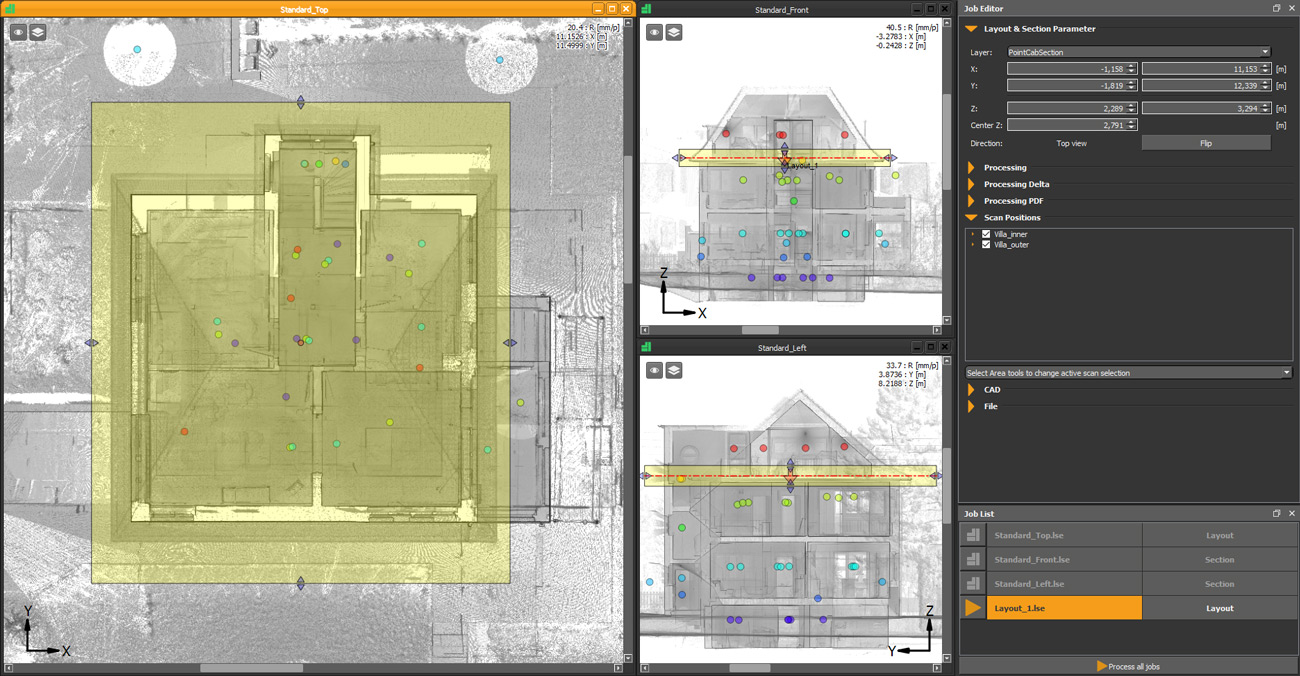
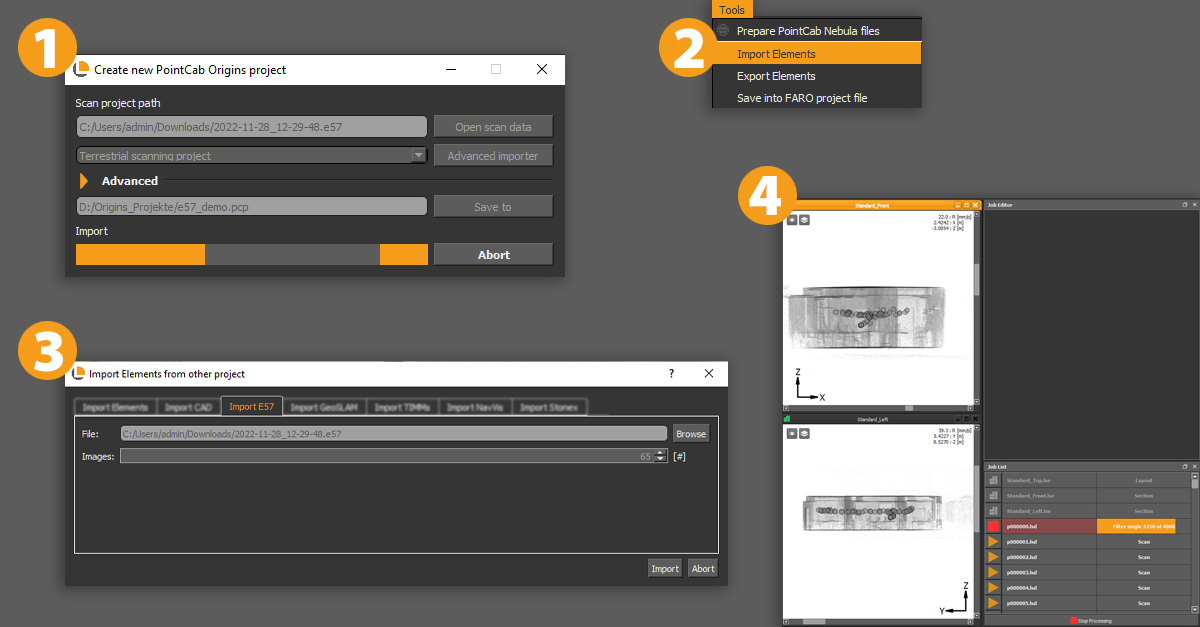
Rohdaten allein bringen keinen Mehrwert – erst mit spezialisierter Software wie PointCab Origins lassen sich aus Millionen Punkten verständliche, verwertbare Ergebnisse erzeugen. Die Software ist kompatibel mit allen gängigen CAD- und BIM-Systemen und übersetzt komplexe Daten in greifbare Informationen.
Wussten Sie, dass…?
… moderne LiDAR-Systeme heute bis zu 2 Millionen Messpunkte pro Sekunde erfassen – und dabei Details wie einzelne Blätter an einem Baum oder Kabel in einer Industrieanlage erkennen können?
Das war der letzte Teil dieser Reihe
Neugierig auf mehr? Wir veröffentlichen regelmäßig Artikel in unserem Blog. Dranbleiben lohnt sich.
Sie wollen immer auf dem neusten stand bleiben?
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!