The AEC Impact
World Nature Conservation Day –
How Laser Scanning Supports a More Sustainable Future

The Architecture, Engineering, and Construction (AEC) industry stands at the forefront of shaping our built environment. In our series “The AEC Impact” we explore the myriad ways in which the industry contributes to societal well-being, environmental sustainability, and economic growth. Join us as we uncover the transformative power of the AEC industry and its pivotal role in building a brighter, more sustainable world.
How Laser Scanning Supports Conservation

From remote rainforests to urban green spaces, laser scanning technology helps researchers and organizations in many different ways:
- Monitor forest health and deforestation
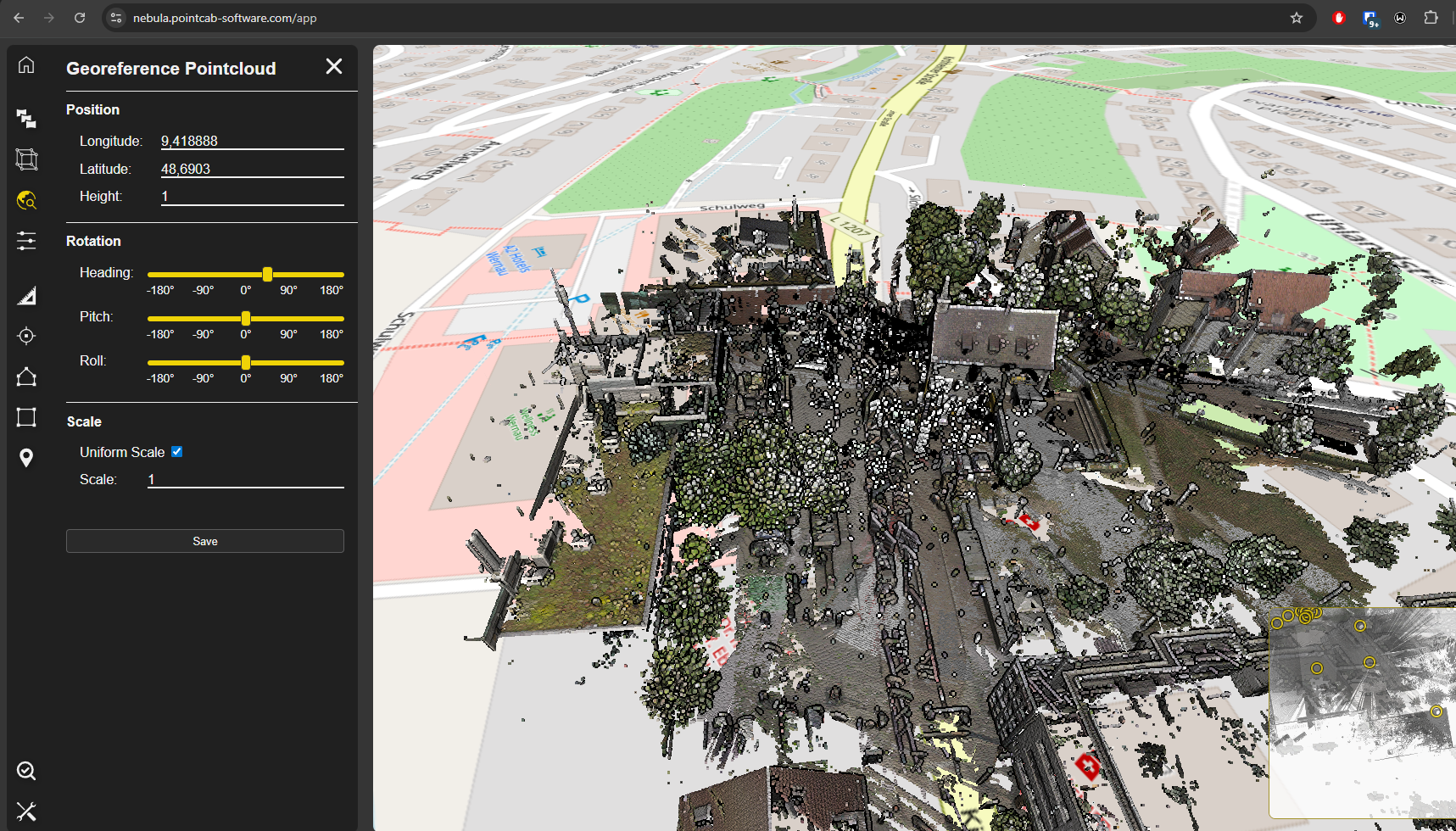
→ High-resolution scans can detect subtle changes in vegetation over time. - Create digital twins of natural landmarks
→ This helps preserve vulnerable ecosystems and supports restoration after natural disasters. - Track erosion and water levels in riverbanks and coastal zones
→ Accurate 3D models allow experts to assess risks and plan interventions. - Document caves, cliffs, and fragile habitats without physical contact
→ Non-invasive scanning helps protect areas where human presence might cause damage. - Giving Old Buildings a Greener Future
→ Scanning existing buildings helps to restore them in an energy-efficient way, also saving precious resources by not building new structures
These projects often involve interdisciplinary teams: ecologists, engineers, architects, and geospatial experts working together.
Real-life examples: Protecting Dune Ecosystems in the Netherlands
In the coastal dunes of Vlieland, an island in the Dutch Wadden Sea, researchers used LiDAR combined with aerial imagery to map the spread of invasive shrubs like Prunus serotina and Rosa rugosa. These species threaten native dune biodiversity, but detecting them manually across large, shifting landscapes is difficult and resource-intensive.
By incorporating LiDAR-derived canopy height data into their analysis, the team improved their detection accuracy by more than 10%, enabling more targeted removal and less environmental disturbance.
“The use of LiDAR improved classification of shrub cover substantially, especially in detecting higher-density patches.”
— Van Iersel et al., Remote Sensing in Ecology and Conservation (2020)
🔗 Full Report (Open Access)
This approach helps preserve native dune flora and fauna while reducing the need for broad mechanical or chemical interventions.

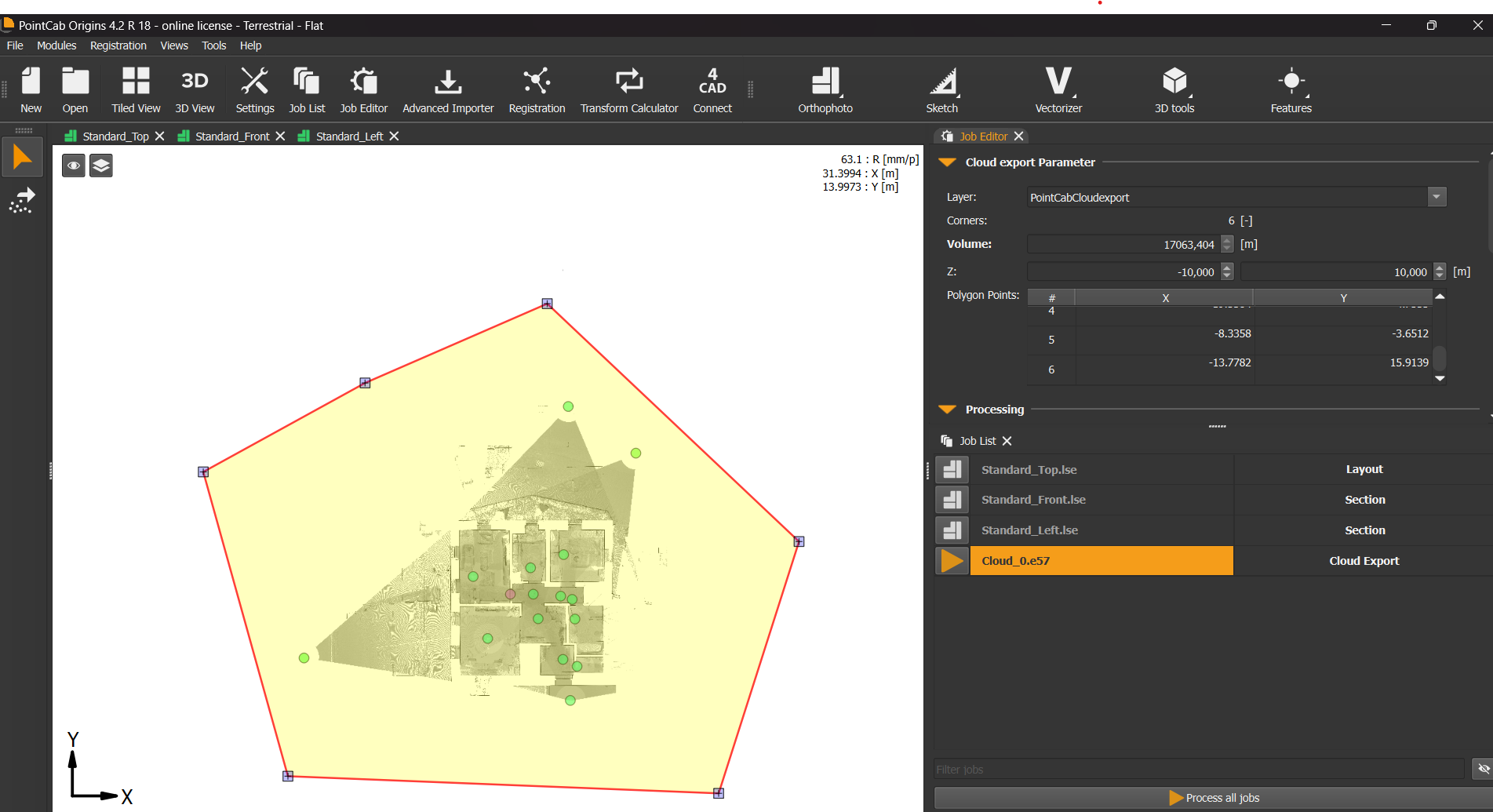
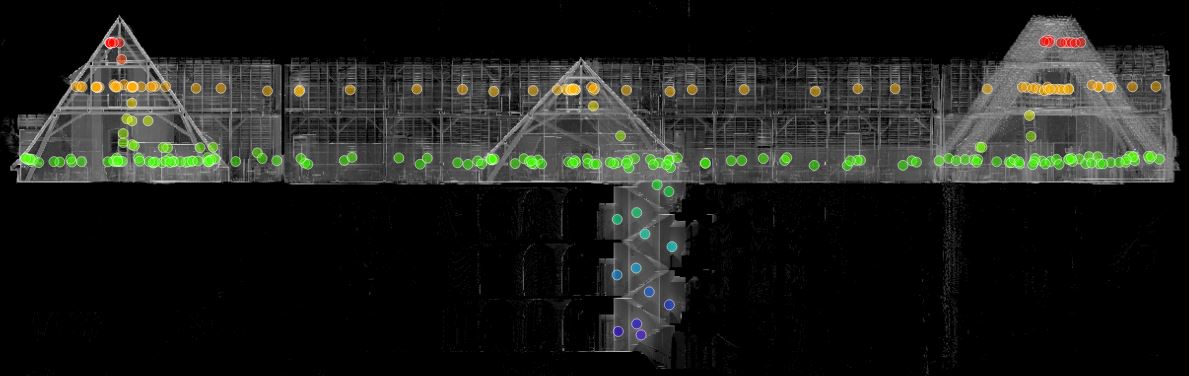
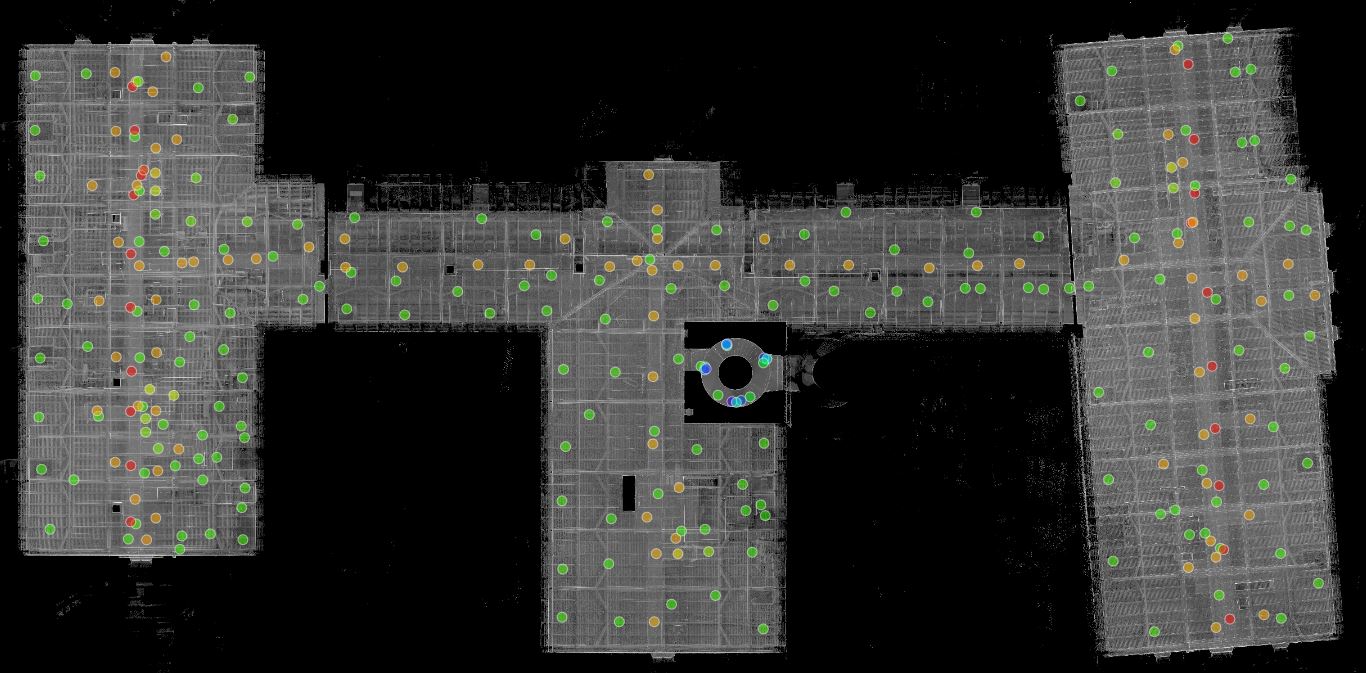
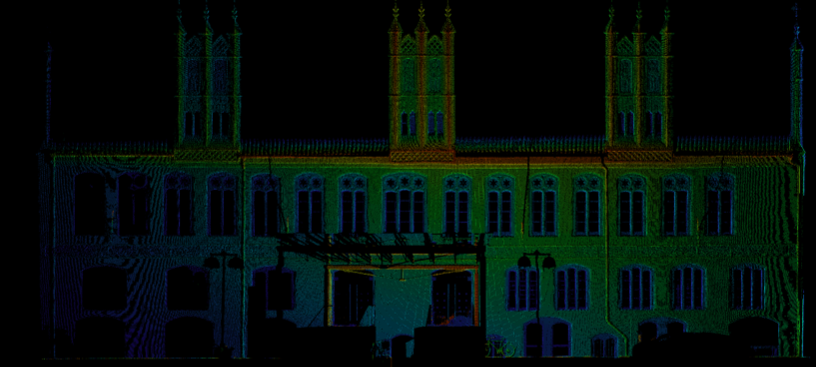
Real-life Examples: Scottish National Portrait Gallery

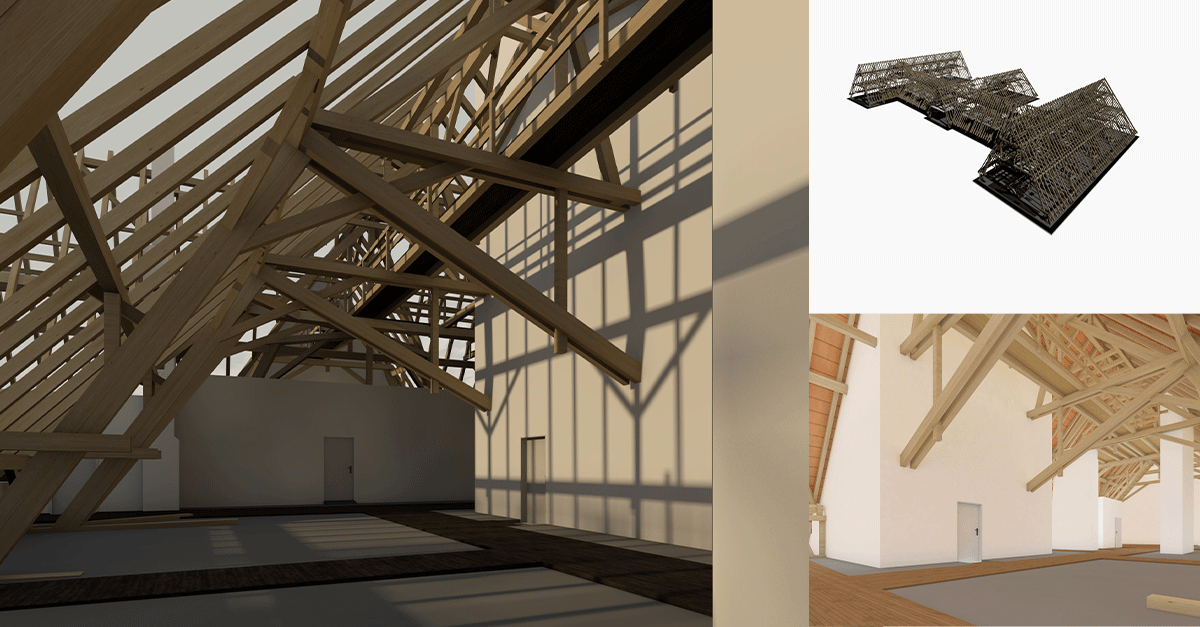
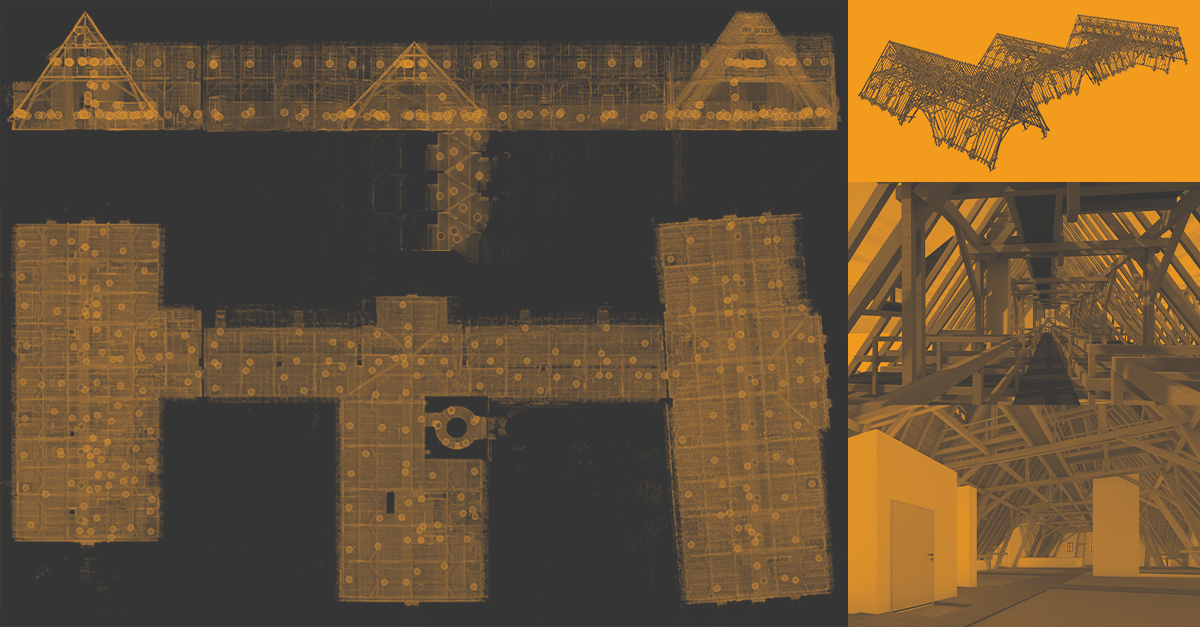
In the Scottish National Portrait Gallery, Edinburgh 3D laser scanning captured the entire structure of the historic building in precise detail. Then a BIM model was created, helping to plan renovations without damaging original features. It also enabled detailed analysis of thermal bridging, structural conditions, and spatial coordination for new systems. This lead to:
- Improved insulation and air tightness without compromising heritage elements
- Integration of energy-efficient lighting and HVAC systems
- Achieved a 14% reduction in annual CO₂ emissions, contributing to overall better energy performance while maintaining historical integrity
Laser scanning was essential in balancing heritage preservation with modern energy standards.
Honoring the People Behind the Scans
These successes weren’t born from gadgets alone. They reflect the dedication of surveyors, ecologists, engineers, architects, and technicians. Their expertise ensures technology serves both people and nature.
On World Nature Conservation Day, their quiet yet crucial contributions deserve our deepest gratitude.

Want to keep up with the latest pointCab news?
Then follow us on Social Media or subcribe to our newsletter!