USER STORY
CHAPEL ENSMAD – Efficient Surveying of a Historic Building

What’s It About?
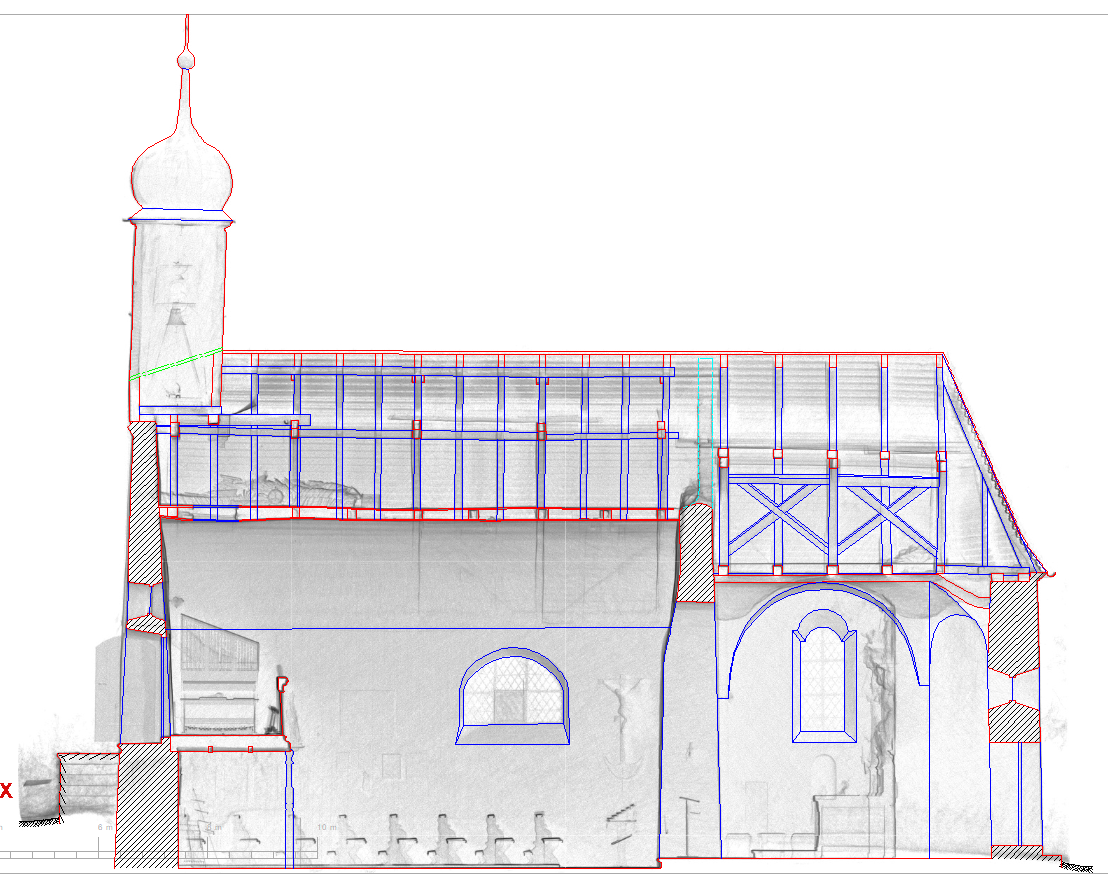
Daniel Bayha, a master’s student in Structural Engineering at the Stuttgart University of Applied Sciences, developed a digital workflow for his thesis to precisely document the historic Ensmad Chapel. His approach covered everything from the wooden barrel vault construction to the entire building condition – inside, outside, and within the roof space.
A key focus was not just the structural assessment of the timber construction, but also the creation of highly accurate deformation-based plans—a task that would have been nearly impossible with conventional manual measurement methods. To achieve this, modern laser scanning technologies were combined with specialized software solutions like PointCab Origins.
The Subject – Ensmad Chapel

Ensmad Chapel is a true cultural landmark and has been a pilgrimage site for centuries. Originally built in the Gothic style, it underwent a significant Baroque transformation around 1660 and has been lovingly maintained over the centuries, with the most recent renovation in the 1970s.
Today, the chapel shows visible structural damage that needed to be analyzed. Daniel’s goal was to document the current state of the building and create accurate plans to serve as a basis for future restoration efforts.
Data Collection & Hardware

Daniel opted for the FlexScan 22 platform from Z+F as the hardware for data acquisition. The platform is equipped with the IMAGER 5016 terrestrial laser scanner, which can be used both as a SLAM and as a static scanner. In addition, some details were measured manually to complement the data.
Scanning Duration: Approximately half a day on-site.
Challenges: Limited space, especially in the roof area. The FlexScan 22 had to be manually moved in this section, as it was not possible to walk through with a backpack scanner.
- GOOD TO KNOW: COMBINING SLAM & TERRESTRIAL SCANNERS
The combination of SLAM and terrestrial laser scanners brings together the best of both worlds:
SLAM scanners allow for quick and mobile real-time data capture – ideal for large or hard-to-reach areas.
Terrestrial laser scanners provide precise measurements and detailed imaging of key areas.
This approach enables the creation of an initial rough map using SLAM, which is then refined with the precise terrestrial scan data. The result? Time savings, increased efficiency, and a comprehensive and reliable data foundation tailored to the specific application.
However, in this case, certain details were additionally measured by hand.
Data Processing & Plan Creation
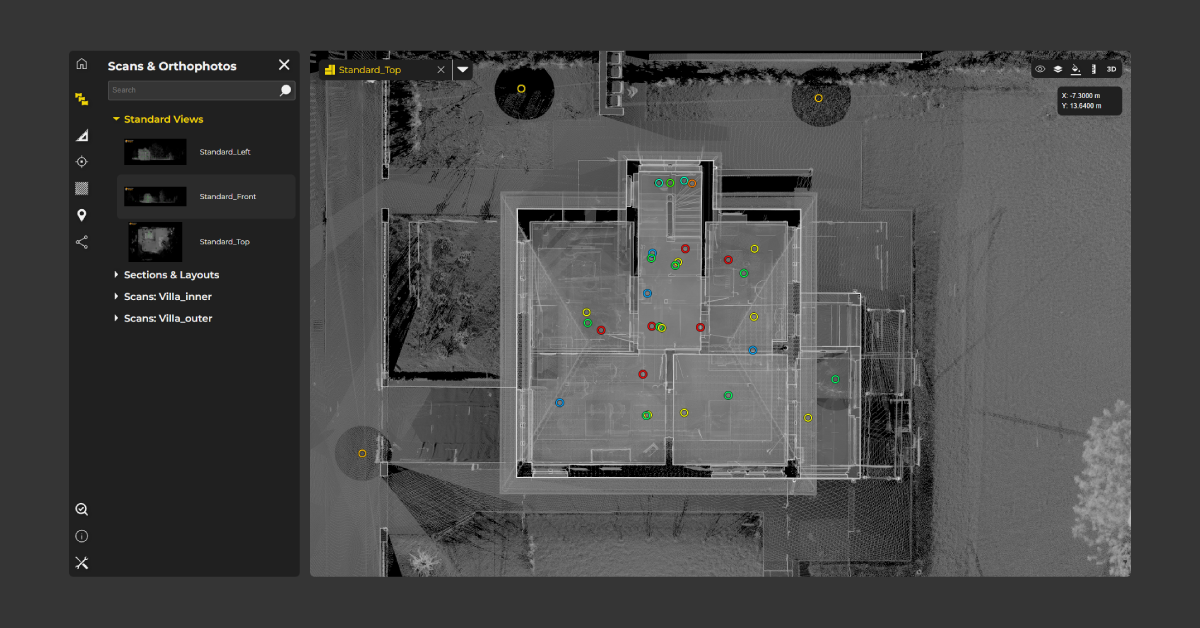
After data collection, erroneous points – such as those caused by passing individuals – were removed. This process took about a day and was conducted externally. The cleaned point cloud (in .E57 format) was then imported into PointCab Origins for further processing.
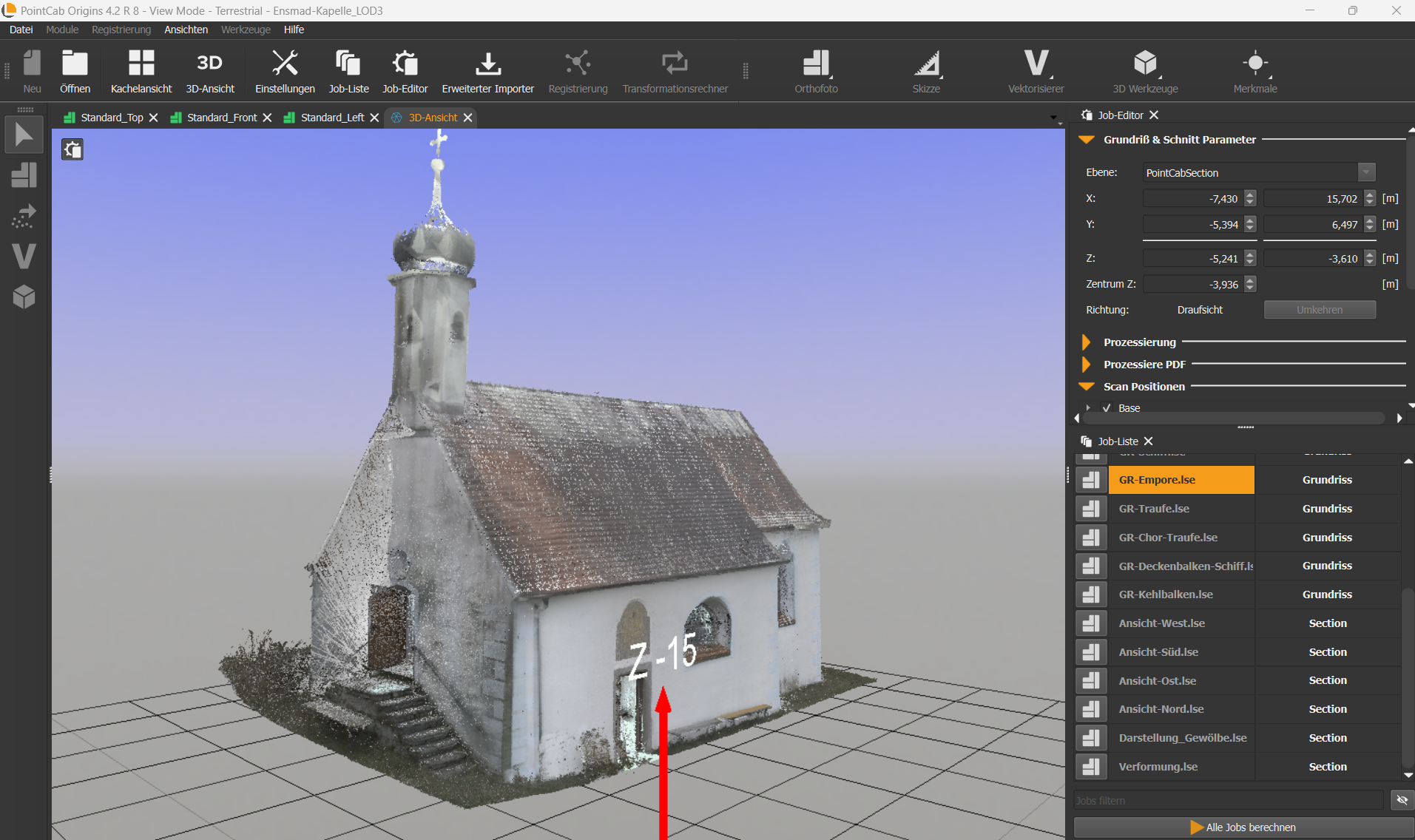
Using PointCab Origins, 2D sections (cross-sections, longitudinal sections, and top views) were generated from the 3D data. Daniel needed about a day to familiarize himself with the software, followed by approximately two days to create the sections.
- GOOD TO KNOW: HOW TO BECOME AN ORIGINS PRO (FAST)
With our YouTube tutorials and PDF guides on our website, Daniel was able to get started with Origins quickly and independently.
For those looking to become an Origins expert right away, we also offer a free demo session with our support specialists.
Data Export & Further Processing
The plans were exported as PDFs, which were then imported into Nemetschek Allplan. There, Daniel manually redrew the plans, achieving an accuracy of ±3 cm.
Alongside Allplan, Bluebeam Revu Extreme was also used for further PDF data processing.
Total Time Required: The final plan creation took about a week in total.
- TIP: DATA EXPORT
A faster workflow:
If Daniel had exported the plans directly as planar .dwg files – automatically aligned and scaled for Allplan – he could have skipped the PDF export step, saving significant time.
Good to know:
PointCab Origins is compatible with all major CAD programs and enables exports into their native formats. If you’re unsure about the best export option, our support team is always happy to help.
Conclusion & Key Takeaways

The Ensmad project impressively demonstrates how modern surveying technologies and specialized software solutions work together to digitally capture and prepare historic structures for restoration planning. Here are the key takeaways from the project:
1. Precision in Plan Creation:
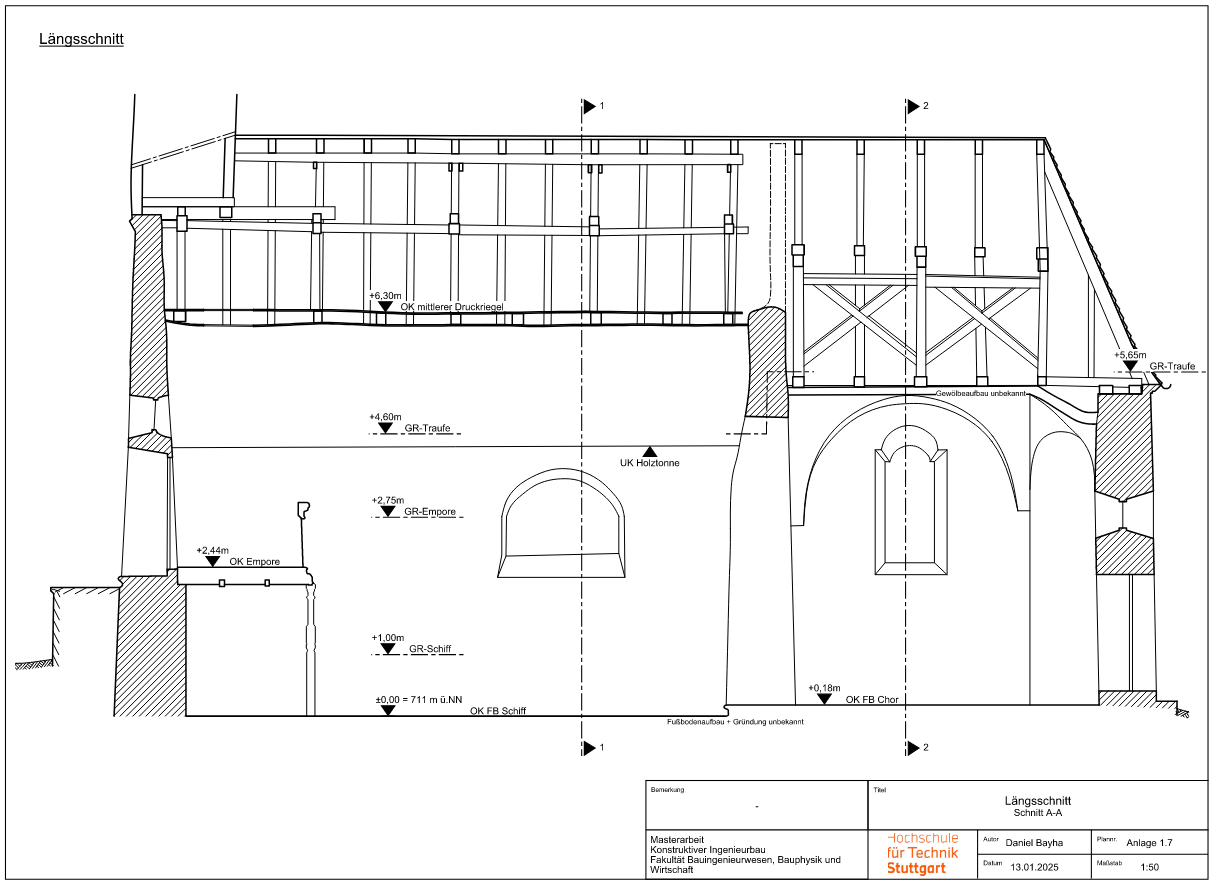
By combining modern laser scanning technology with PointCab Origins, it was possible to generate an unlimited number of highly accurate plans that faithfully reflect the chapel’s deformations and details.
2. Time and Work Efficiency:
Despite some detours in the workflow, the project showed that complex surveying tasks can be completed efficiently with the right digital tools.
3. Optimization through Support:
If users encounter workflow obstacles, they should reach out to PointCab Support. Often, alternative export methods or workflow optimizations can be quickly implemented together.
Project Participants
This project was conducted by Daniel Bayha as part of his master’s thesis, “Surveying and Restoration of the Wooden Barrel Vault in Ensmad Chapel”.
University: Stuttgart University of Applied Sciences
Program: Structural Engineering
Academic Supervisor (HFT): Prof. Dr.-Ing. Roland Fink
Project Supervisor (LAD): Sabine Kuban
Want to keep up with the latest pointCab news?
Then follow us on Social Media or subcribe to our newsletter!