



Schwierigkeiten oder merkwürdige Ergebnisse beim Import von Punktwolken aus einem Trimble X9 Laserscanner?
Keine Sorge, wir lösen das mit einer kleinen Einstellung.
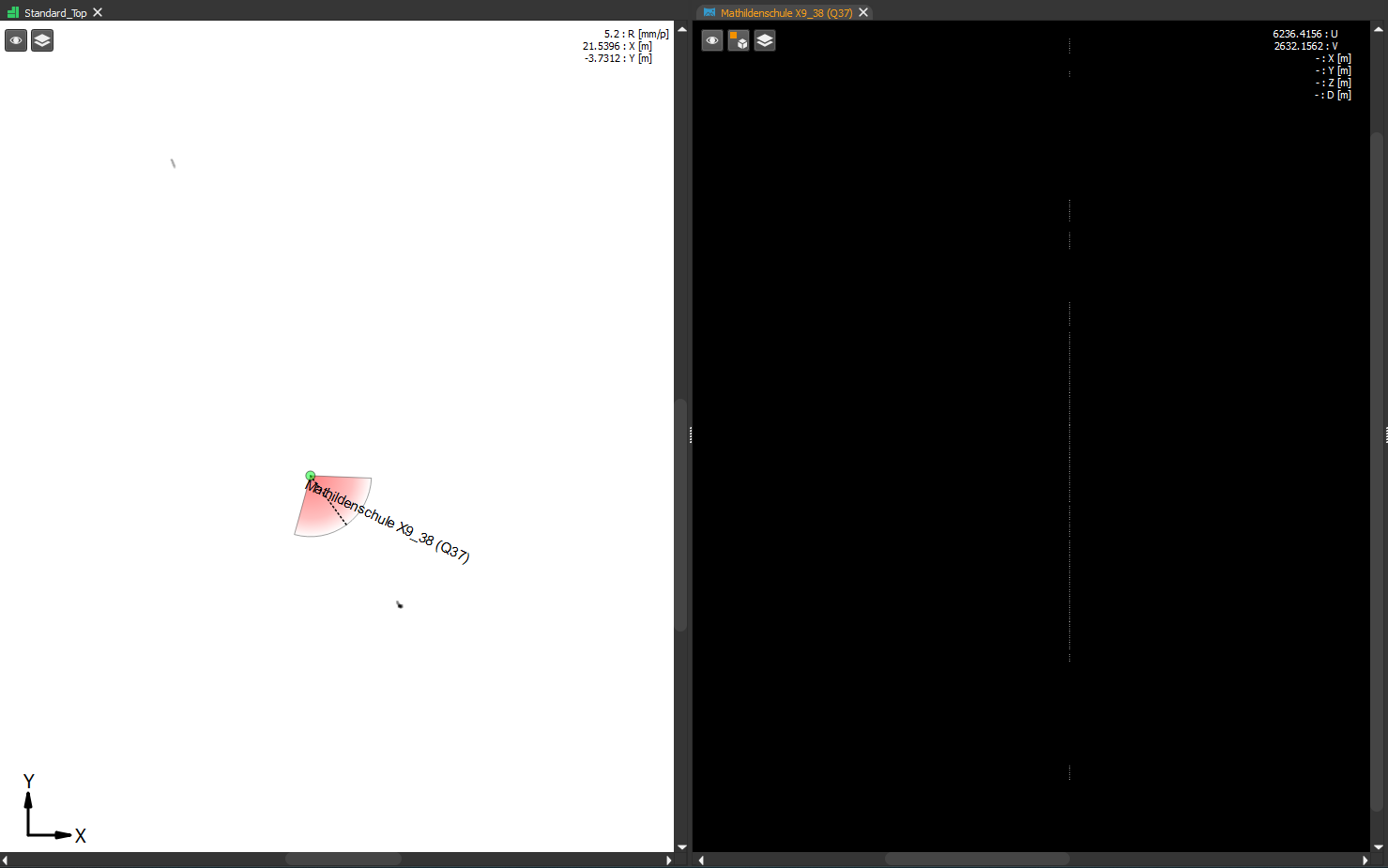
Was ist der Auslöser des Problems?
Trimble-Scans enthalten leere Zeilen und Spalten, wodurch ein „Schachbrettmuster“ in den Daten entsteht.
Dies kann dazu führen, dass Punkte aufgrund des Nachbarschaftsfilters herausgefiltert werden, der Punkte entfernt, die zu weit voneinander entfernt sind.
Keine Sorge, wir beheben das zusammen!
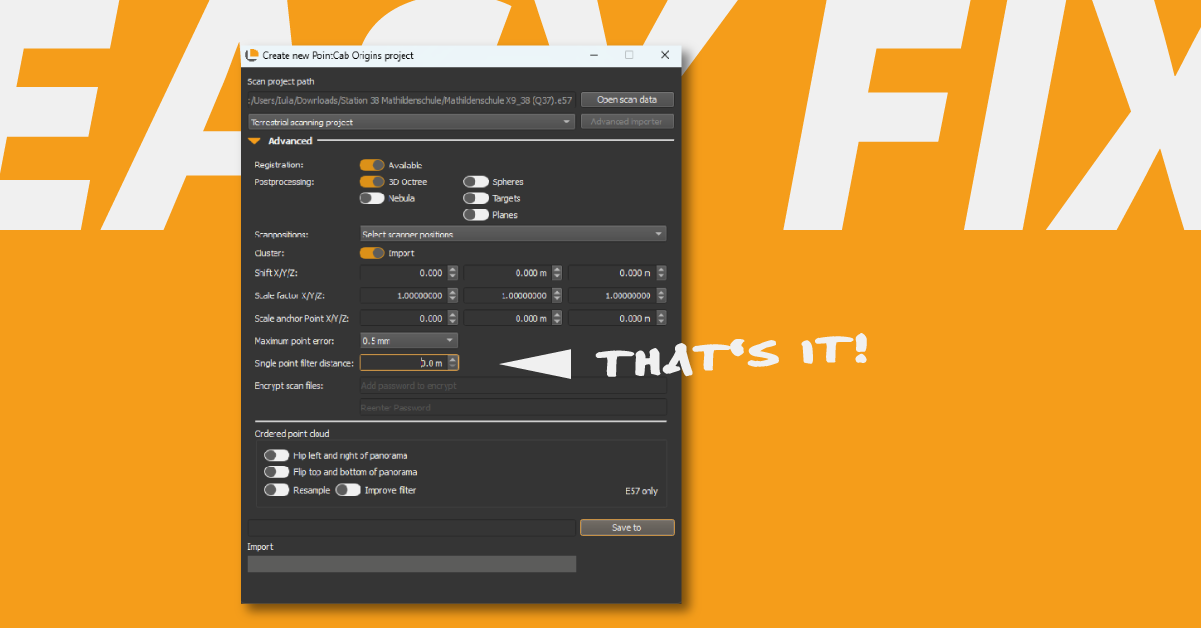
Was muss verändert werden?
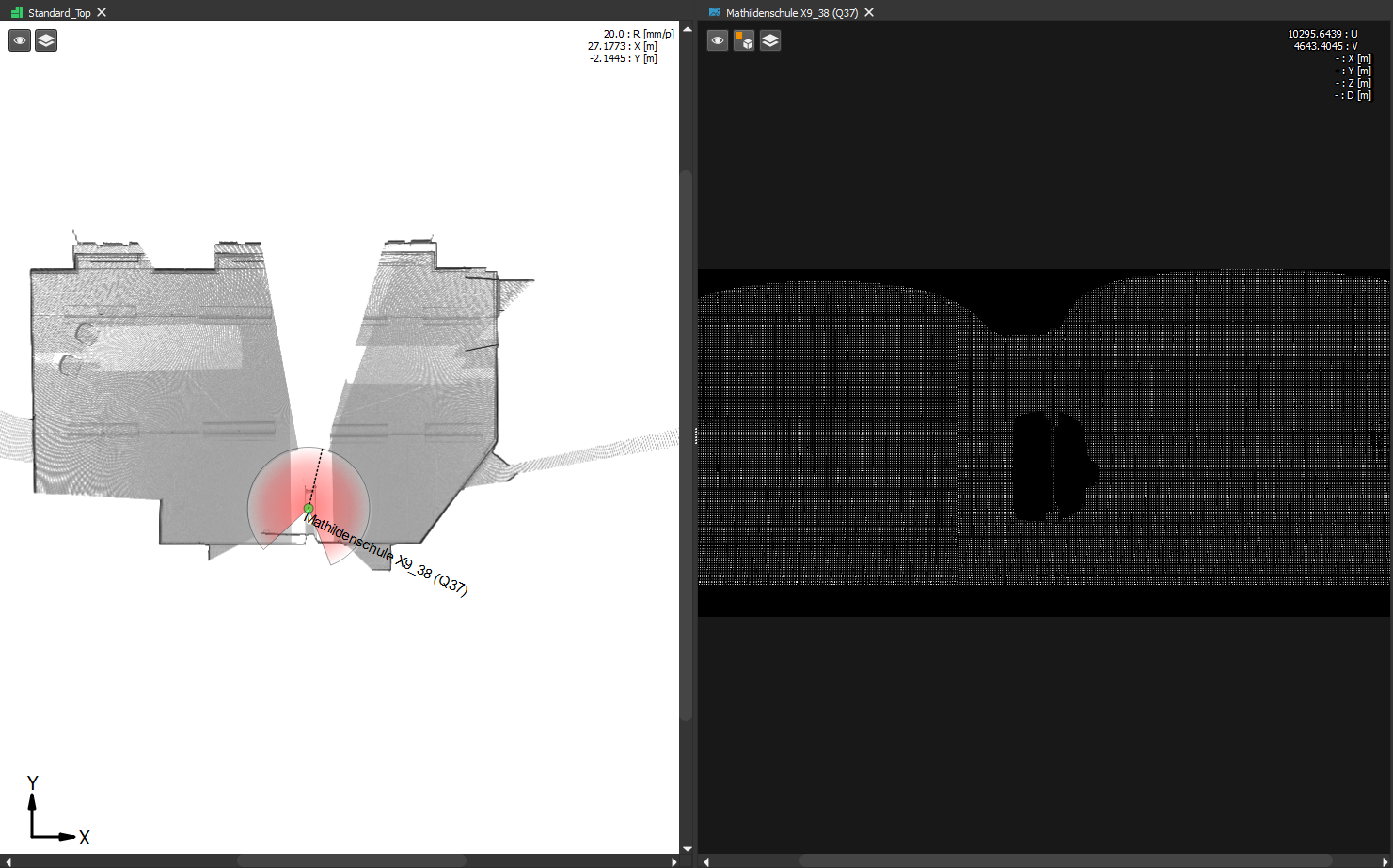
Problem gelöst!
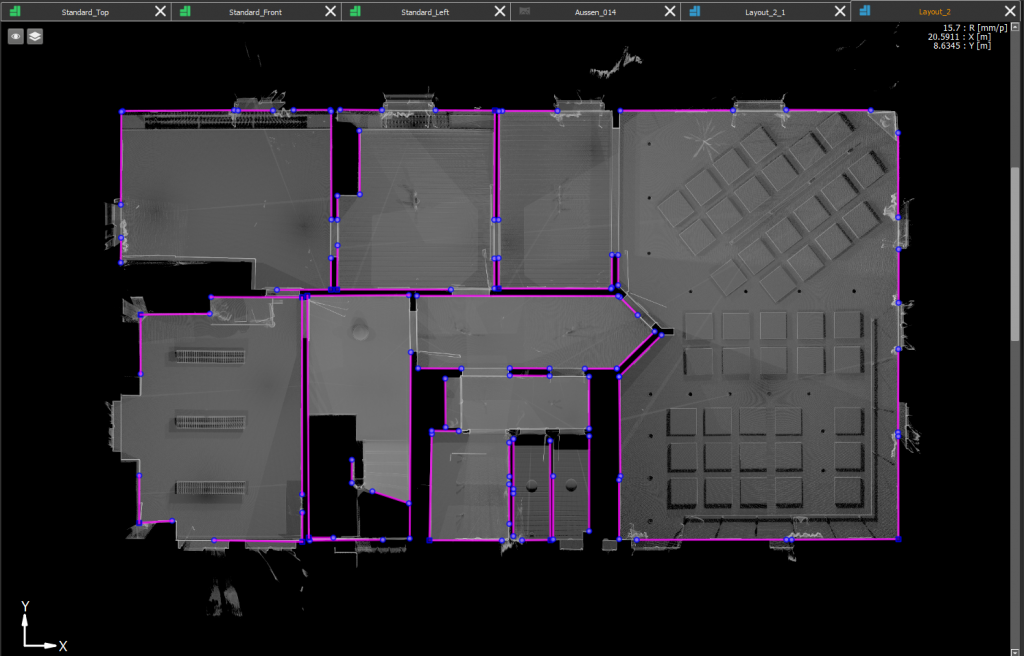
Mit den veränderten Einstellungen, werden die Punktwolkendaten aus dem Trimble X9 nun korrekt dargestellt.
In der Standard-Top-Ansicht wie auch im Panorama wird nun alles korrekt dargestellt.
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!

Contents
Der Auslöser für diesen Beitrag
Was Georeferenzierung eigentlich ist – und warum sie in Archicad relevant ist
Die Herausforderung: Große Koordinaten, eingeschränkte Performance
Der Trick: Temporäre Verschiebung statt dauerhafter Transformation
Bonus-Tipp: Transformations-Einstellungen vergessen?

Supportfälle aus der Praxis – verständlich erklärt, Punkt für Punkt.
In dieser Serie nehmen wir reale Supportanfragen unter die Lupe, die bei der Arbeit mit Punktwolkendaten auftauchen. Jeder Beitrag basiert auf einem echten Fall und zeigt Schritt für Schritt, was passiert ist, wieso es passiert ist und wie sich das Problem lösen lässt.
Dabei beschränken wir uns nicht nur auf die Fehlersuche. Wir liefern zusätzlich Hintergrundwissen zu wichtigen Themen, Tools und Technologien rund um Punktwolken.

Zuletzt meldete sich eine Archicad-Userin bei uns und fragte:
Gibt es eine Möglichkeit, die auf ein Projekt in Origins angewendete Transformation rückgängig zu machen, insbesondere wenn ich die Georeferenzierung für die Modellierung in Archicad beibehalten möchte?
Sie hatte in einem unserer Webinare einen Trick dazu gesehen, konnte die Erklärung aber später nicht mehr finden.
Weil das Thema gerade in BIM-Workflows öfter auftaucht, gibt’s hier eine ausführliche Anleitung für alle, die mit georeferenzierten Punktwolken in Archicad arbeiten.
Bevor es an die konkrete Lösung geht, lohnt sich ein kurzer Blick auf das Grundprinzip:
Georeferenzierung bedeutet, räumliche Daten – etwa Punktwolken – mit echten geografischen Koordinaten abzugleichen, zum Beispiel nach UTM oder Gauß-Krüger. Jeder einzelne Punkt der Punktwolke erhält dadurch eine präzise Position auf der Erde.
Das ist vor allem in AEC-Prozessen wichtig, etwa zur korrekten Einordnung von Scandaten in Bezug auf GIS-Daten, Vermessungsergebnisse oder Baustellenpläne.
In der Theorie sollten sich georeferenzierte Punktwolkendaten einfach in CAD- oder BIM-Software übernehmen lassen. In der Praxis führen die großen Koordinatenwerte (oft im Millionenbereich) aber schnell zu Darstellungs- und Performance-Problemen.
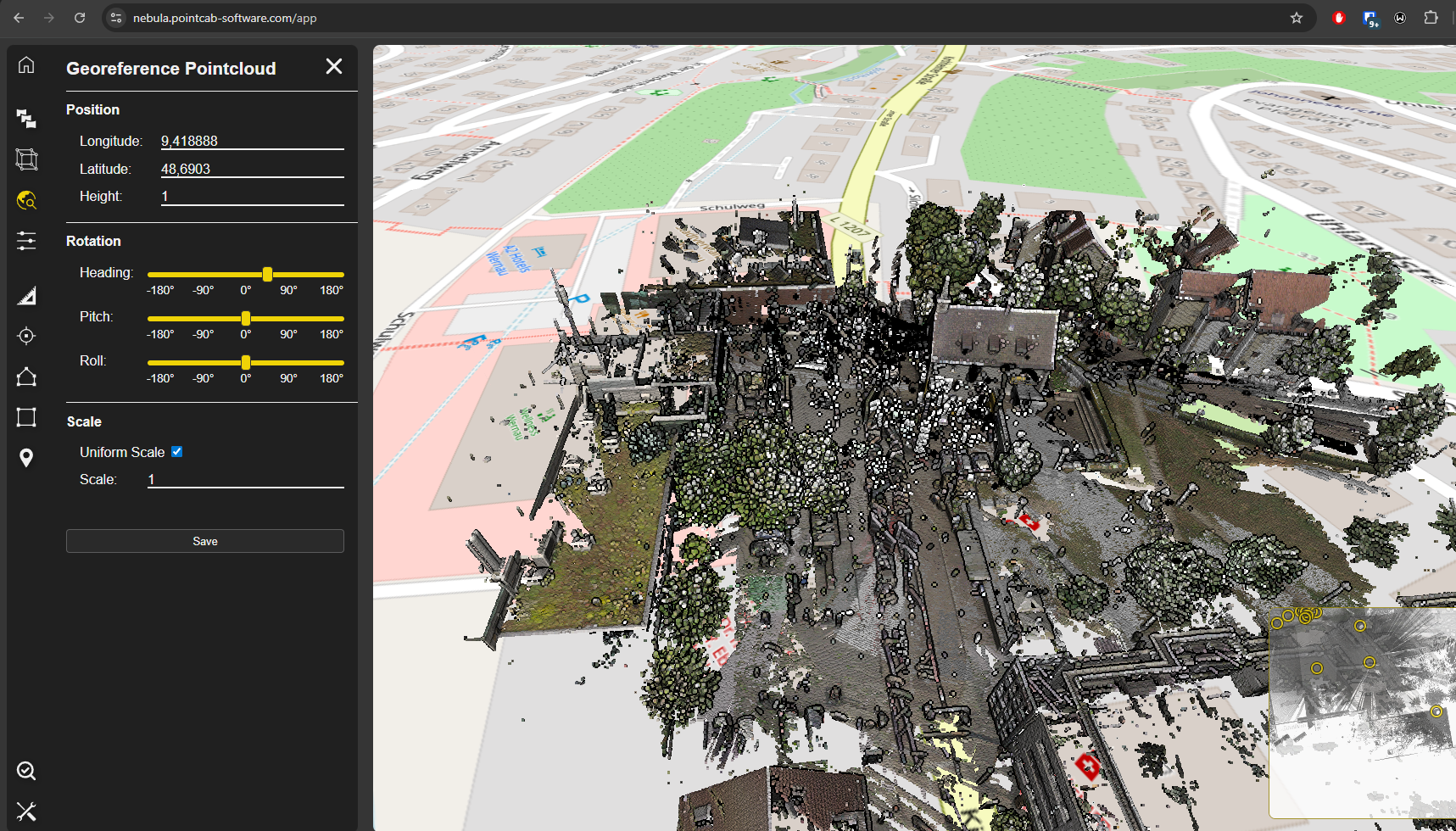

Punktwolken mit Georeferenzierung liegen meist weit vom Koordinatenursprung (0,0,0) entfernt. Viele CAD-Programme wie Archicad oder Revit können dadurch in Schwierigkeiten geraten. Dies kann unschöne Folgen haben:
Wie also lässt sich die Georeferenzierung erhalten, ohne dass das Modellieren in Archicad zur Herausforderung wird?
So gelingt es, mit der georeferenzierung Punktwolke in Archicad effizient zu arbeiten:
1. Keine vollständige Ausrichtung: Translation mit Z-Rotation
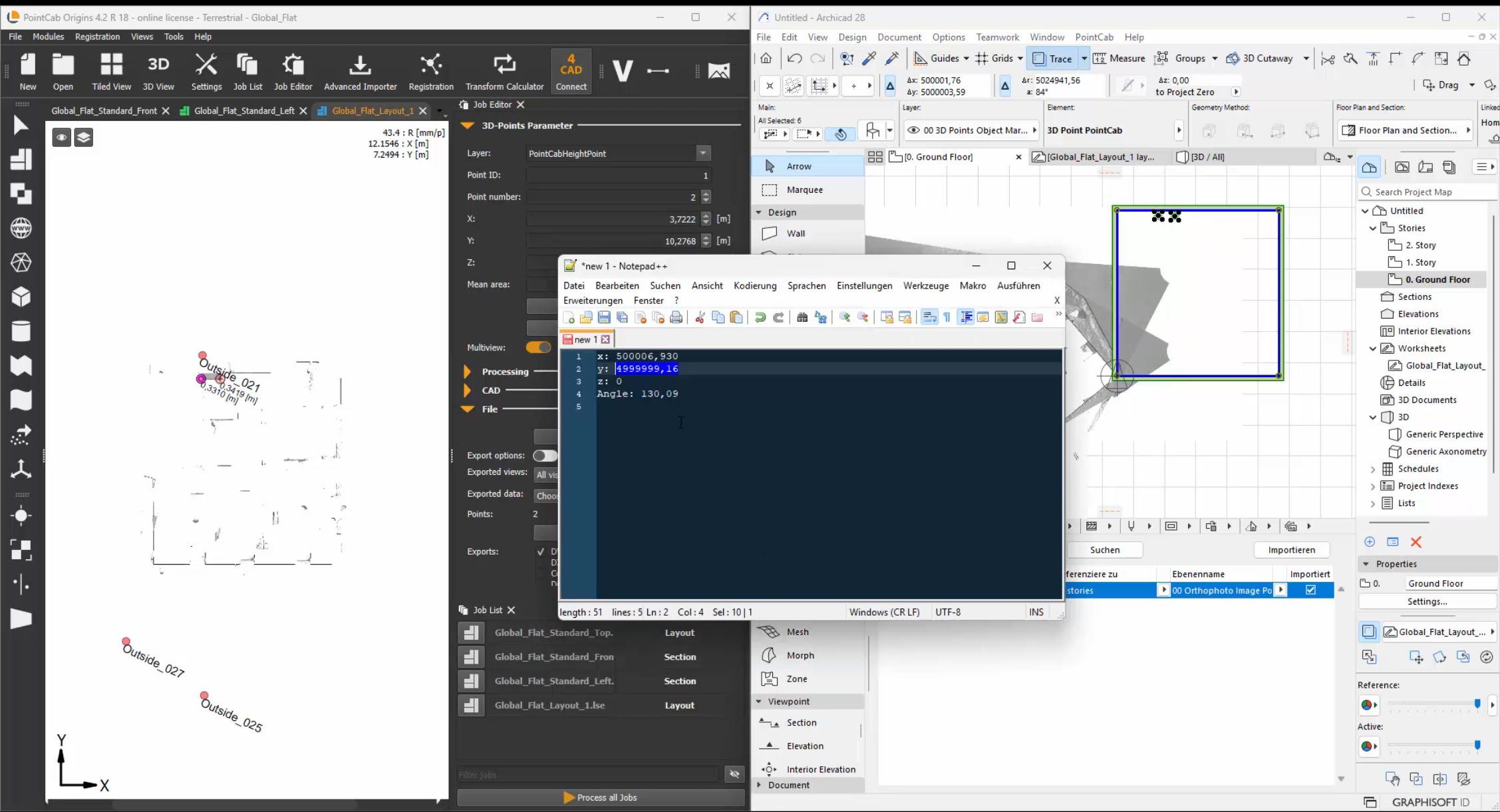
Beim Transformieren in PointCab Origins sollte am besten keine komplette Ausrichtung oder Rotation über alle Achsen vorgenommen werden. Stattdessen sollte man das Projekt mit dem Align Tool verschieben und um die Z-Achse rotieren. Auf Rotationen um die X- und Y-Achse sollte verzichtet werden. – die X- und Y-Achse sollten dabei unverändert bleiben. Die verwendeten Werte lassen sich später direkt als Survey Point in Archicad eintragen.
Tipp: Mit runden, leicht merkbaren Werten arbeiten.
Beispiel: Liegt die ursprüngliche X-Koordinate bei 3.500.357, kann sie auf 0 oder einen glatten Wert gesetzt werden – das macht das Modellieren in Archicad deutlich einfacher.
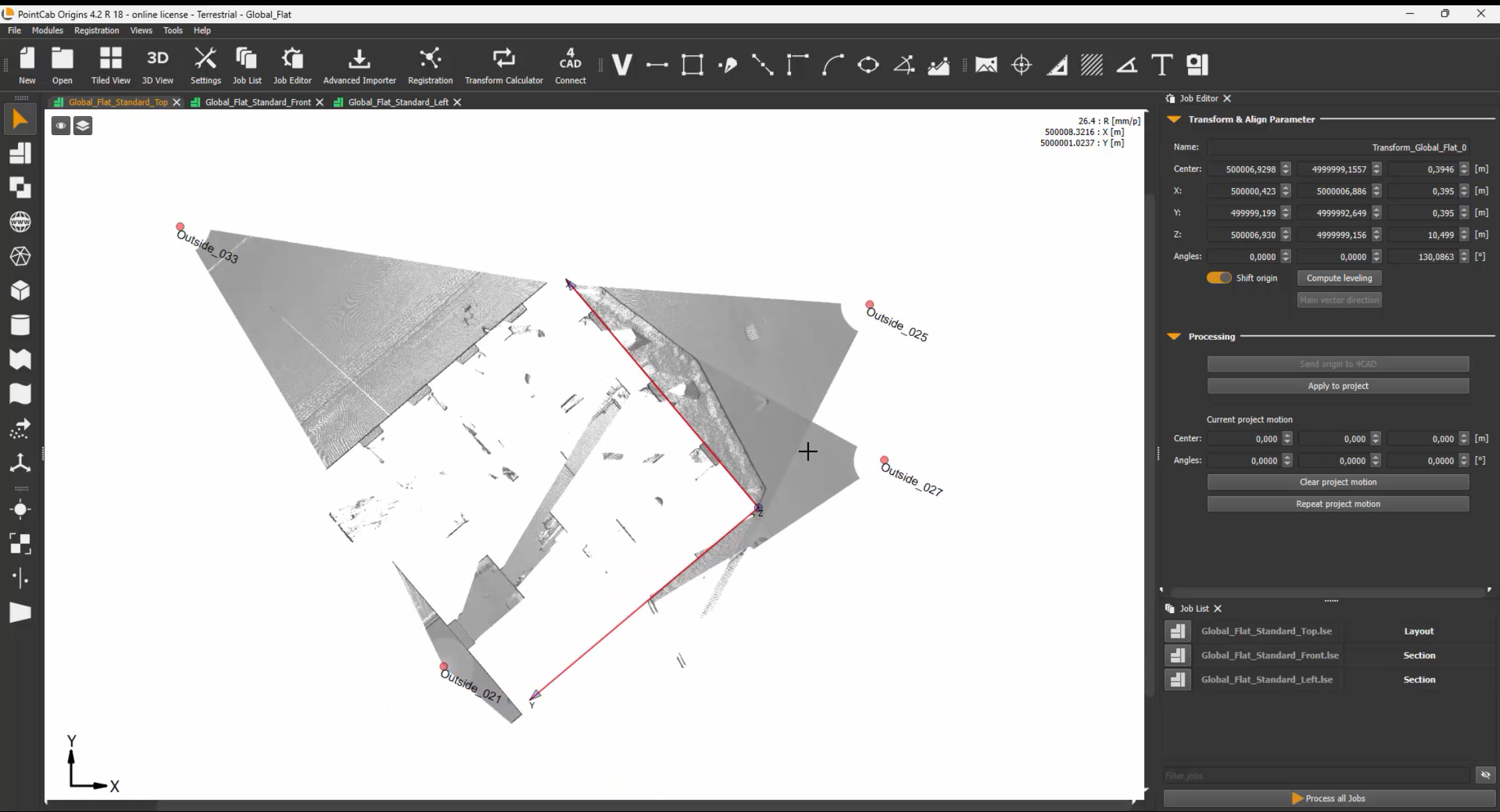
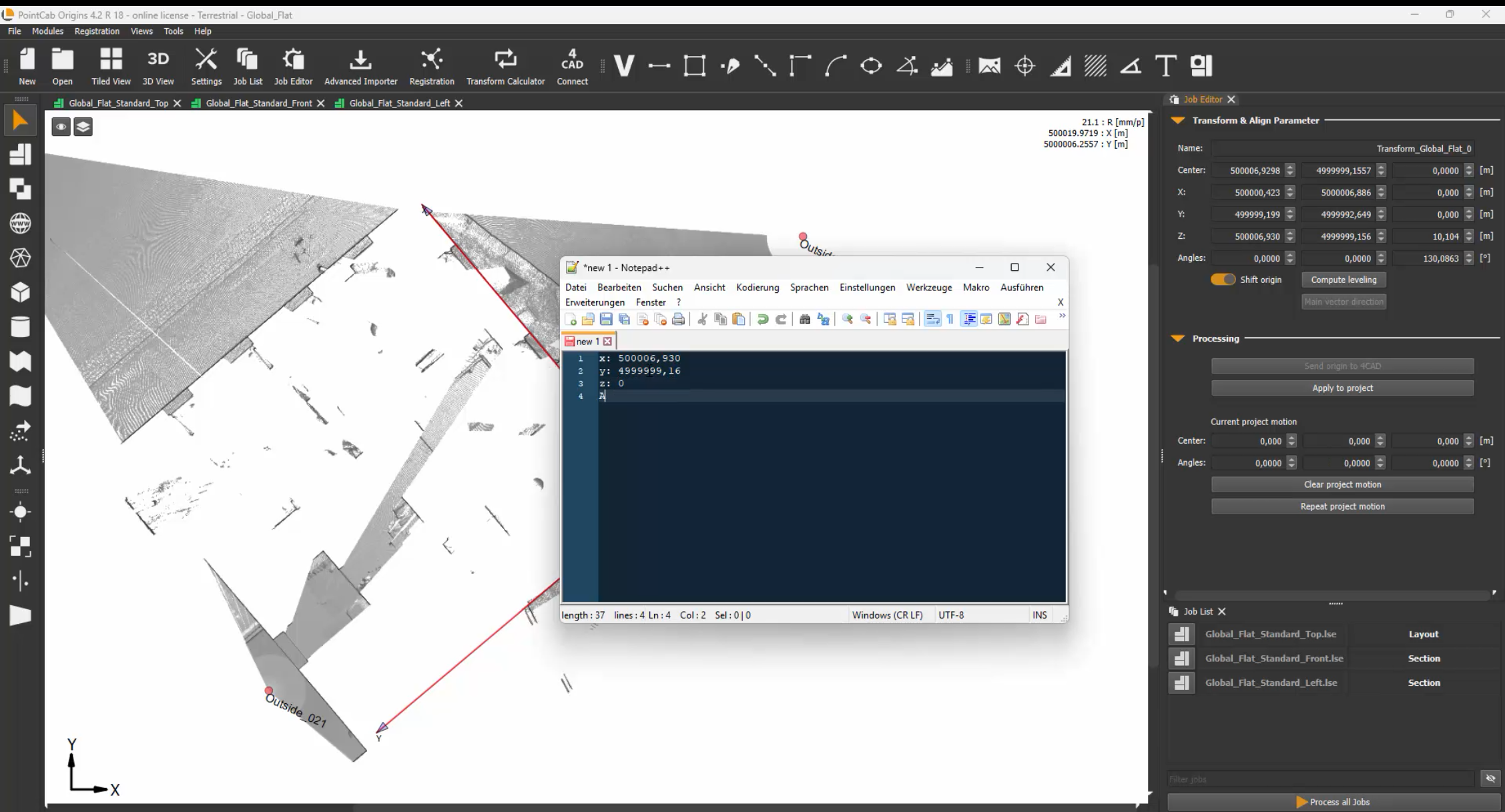
2. Transformation dokumentieren
PointCab Origins speichert alle Transformationswerte automatisch im Align-Protokoll.
Davon sollte man am besten einen Screenshot machen oder die Werte kurz notieren. Diese Angaben braucht es später, um die Georeferenzierung wiederherzustellen.
3. Lokal in Archicad modellieren
Sobald sich die Punktwolke nah am Ursprung befindet, lässt sich in Archicad sauber und flüssig arbeiten. Die Performance verbessert sich spürbar, und die Modellierfunktionen reagieren zuverlässig – ganz ohne Koordinatenchaos.
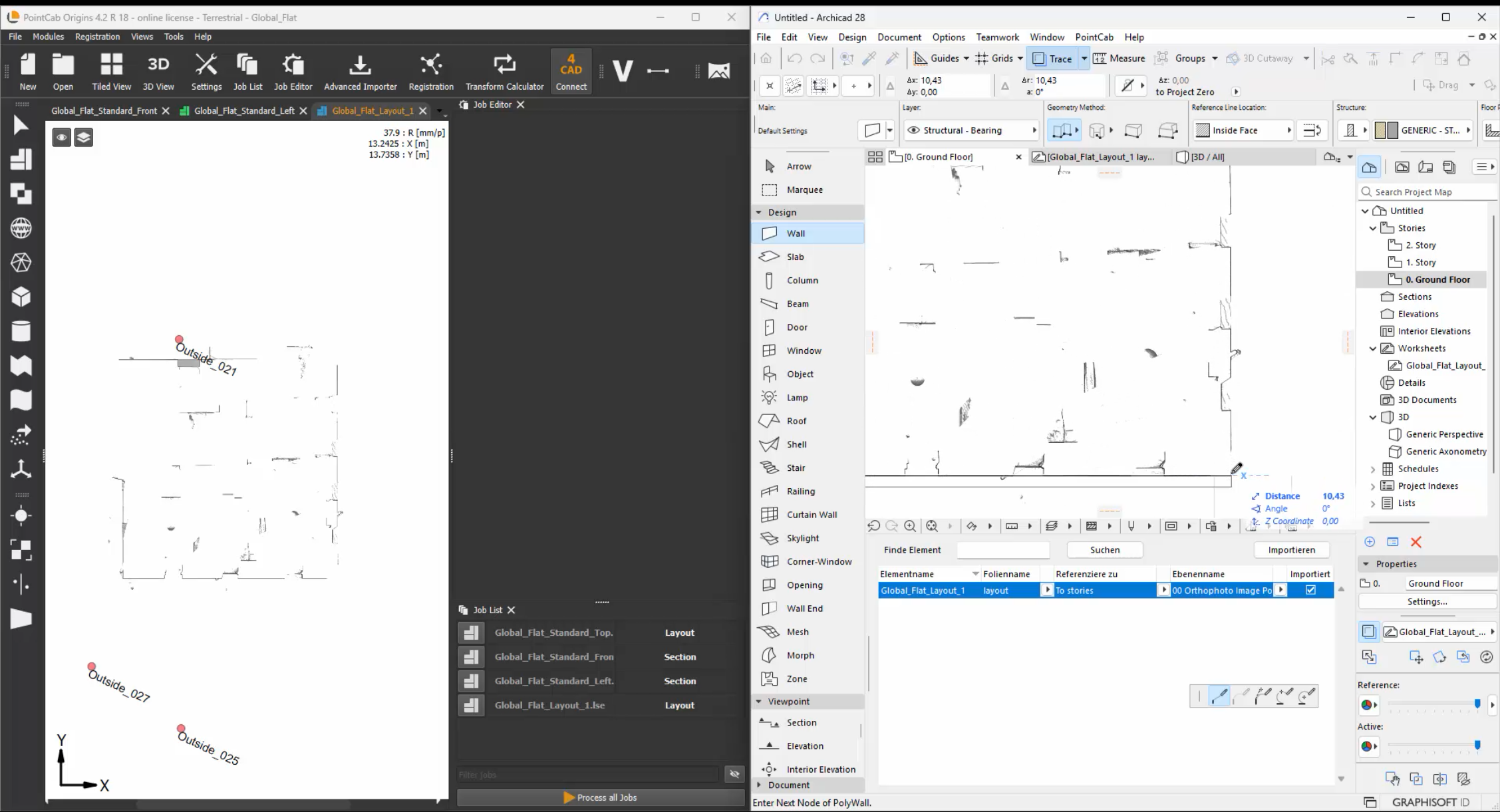
4. Georeferenzierung vor dem Export wiederherstellen
Nach dem Modellieren wird die ursprüngliche Verschiebung einfach rückgängig gemacht.
Das Modell landet damit wieder exakt an der georeferenzierten Position – perfekt für korrekte IFC-, DWG- oder BCF-Exporte.
Kein Problem. PointCab Origins macht’s einfach:

Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!


Supportfälle aus der Praxis – verständlich erklärt, Punkt für Punkt.
In dieser Serie nehmen wir reale Supportanfragen unter die Lupe, die bei der Arbeit mit Punktwolkendaten auftauchen. Jeder Beitrag basiert auf einem echten Fall und zeigt Schritt für Schritt, was passiert ist, wieso es passiert ist und wie sich das Problem lösen lässt.
Dabei beschränken wir uns nicht nur auf die Fehlersuche. Wir liefern zusätzlich Hintergrundwissen zu wichtigen Themen, Tools und Technologien rund um Punktwolken.

„Ich habe nur einen Scan importiert … wieso habe ich plötzlich über 900 Dateien?“
Diese Frage hören wir nicht zum ersten Mal. Da uns aber genau so ein Fall kürzlich im Support wieder erreicht hat, liefert uns das die perfekte Gelegenheit zu erklären, was dabei eigentlich im Hintergrund geschieht. Kleine Beruhigung vorweg: Origins vervielfältigt Daten nicht einfach ungefragt.
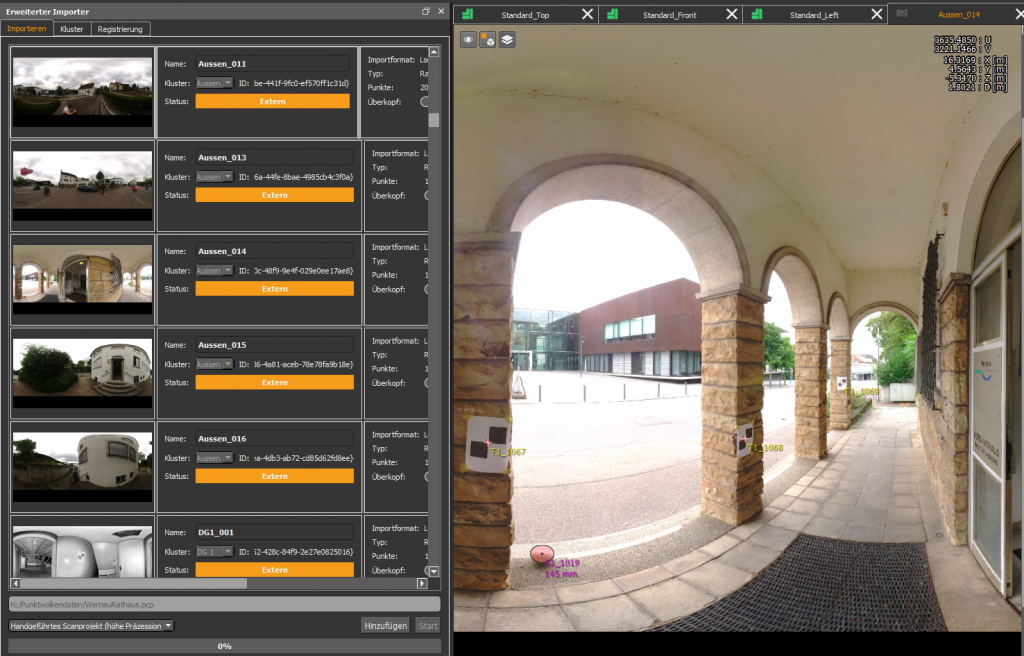
Im konkreten Fall hatte unser Kunde einen einzelnen E57-Scan, exportiert aus Riegls RiSCANpro, in PointCab Origins importiert. Das Ergebnis:
Auf den ersten Blick wirkt der Scan allerdings recht überschaubar. Woher kommen also all diese Dateien? Die kurze Antwort: Das ist kein Fehler, sondern gewollt. Und durchaus sinnvoll.
Um zu verstehen, was genau passiert, lohnt sich ein Blick auf den grundlegenden Unterschied zwischen strukturierten und unstrukturierten Punktwolken – denn der hat großen Einfluss auf die Verarbeitung in Origins.
Strukturierte Punktwolken
Unstrukturierte Punktwolken
Unstrukturierte Formate sind ideal für Software-Kompatibilität und Flexibilität. Sie enthalten aber keine Informationen darüber, wie die Punkte erfasst wurden. Daher muss Origins beim Import eine eigene Struktur aufbauen, damit sinnvoll mit den Daten gearbeitet werden kann.
Wer mehr über das Thema strukturierte und unstrukturierte Punktwolken wissen möchte, dem können wir übrigens unser Webinar dazu wärmstens empfehlen.
Mit diesem Hintergrundwissen bewaffnet können wir uns nun wieder unserem eigentlichen Support-Fall widmen. Schauen wir uns an, was beim Import eines unstrukturierten Scans in Origins tatsächlich geschieht:
Man kann sich das ein bisschen so vorstellen wie eine Straße zu einer abgelegenen Hütte: Selbst wenn dort nur ein Haus steht, muss der ganze Weg dorthin gebaut werden – sonst kommt man nicht hin.
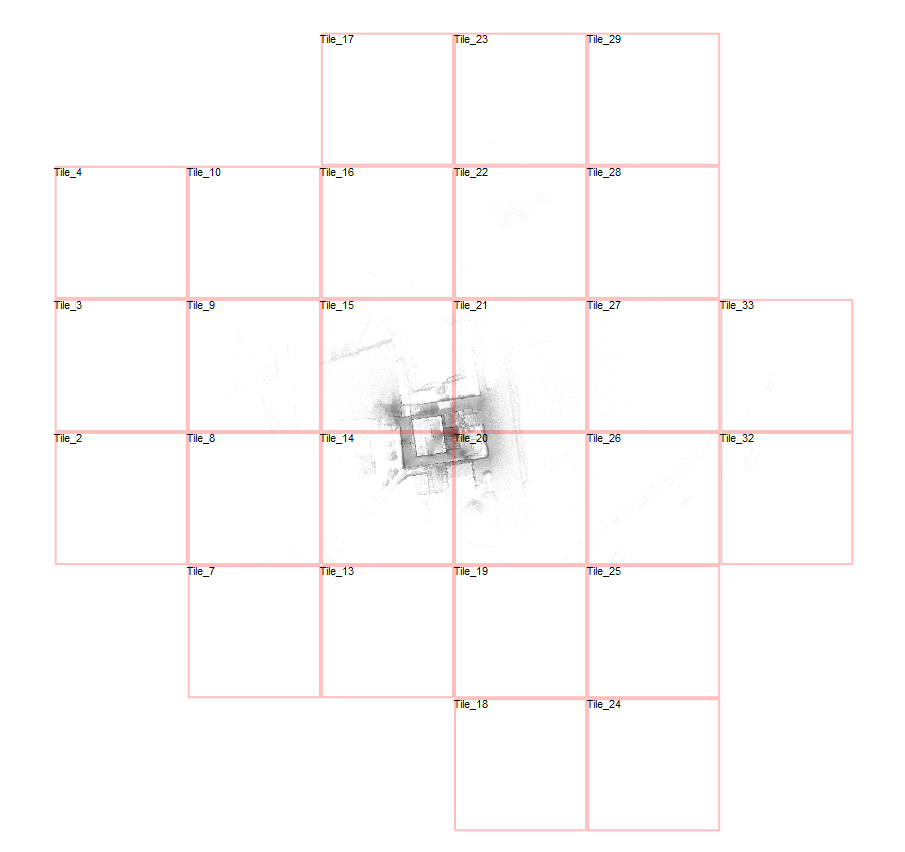
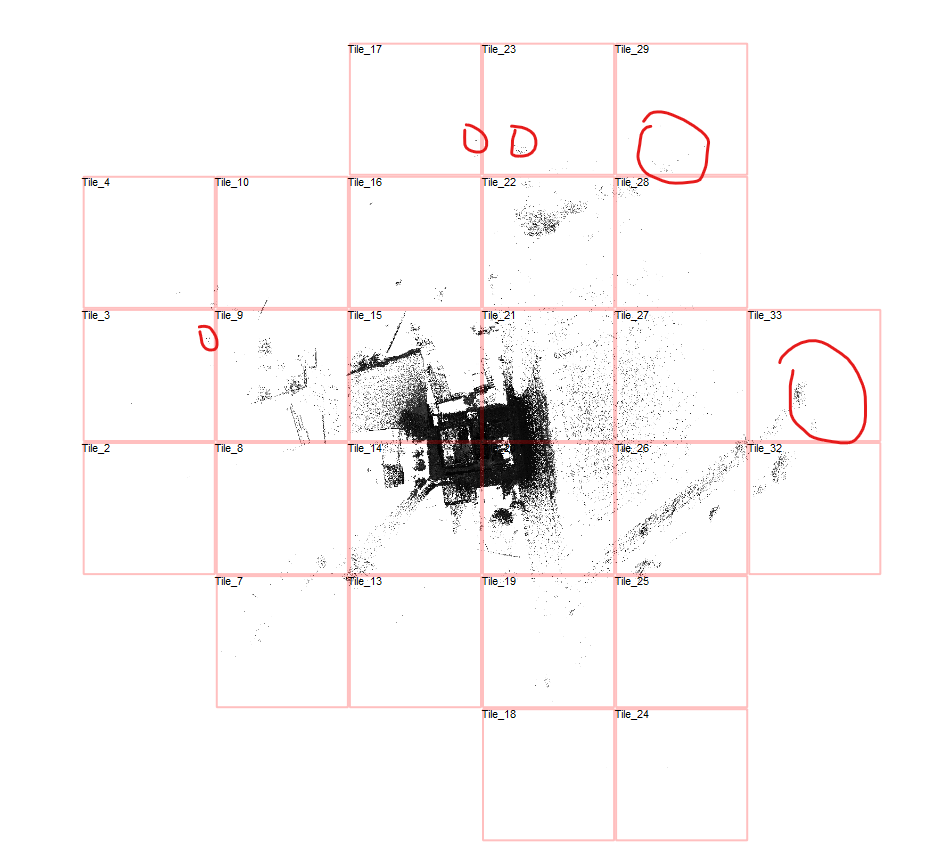
Um dem Ganzen auf den Grund zu gehen, wurde der Scan geöffnet und mit der Taste „B“ in der Top View die Kachelgrenzen sichtbar gemacht. Dabei zeigte sich:
Der eigentliche Zielbereich war zwar deutlich kleiner, aber durch einzelne, verstreute Punkte, musste die gesamte Umgebung mit abgebildet werden. Genau diese Punkte zogen dadurch eine große Zahl an zusätzlichen Kacheln – und damit Dateien – nach sich.
Ist das ein Problem? In der Regel: Nein.
Origins verarbeitet auch große Mengen an .lsd-Dateien effizient. Die meisten davon sind sehr klein und wirken sich kaum auf Ladezeiten oder Speicherplatz aus – außer bei extrem großen Scanbereichen oder auf leistungsschwachen Rechnern.
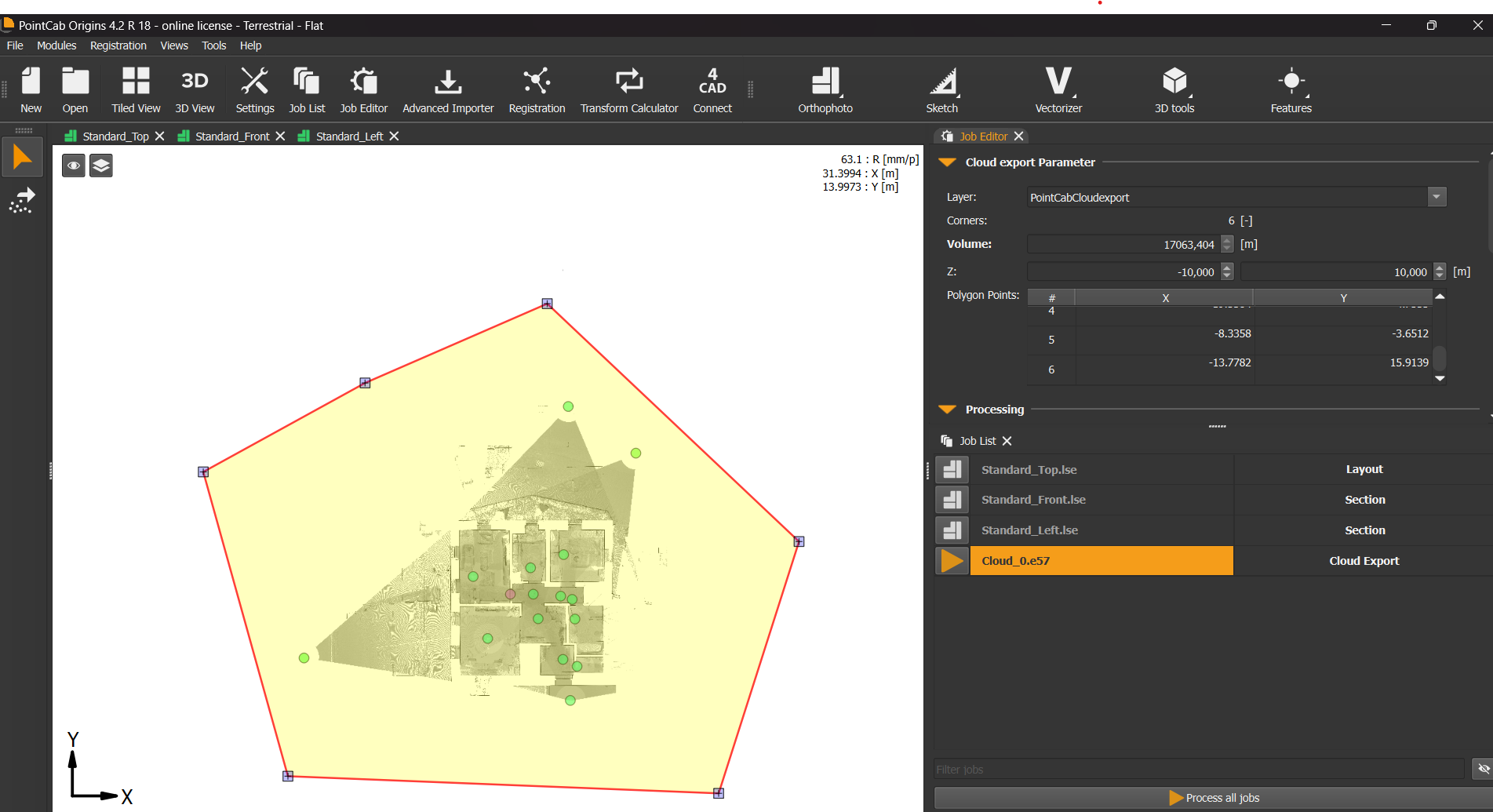
Wer allerdings Wert auf eine schlanke Projektstruktur und kürzere Ladezeiten legt, kann mit einem gezielten Workflow gegensteuern. So sieht der Workflow dafür aus:
Das Ergebnis: Weniger Dateien, geringerer Speicherbedarf, bessere Performance und trotzdem alle relevanten Daten im Blick.
Wenn aus einem einzigen Scan plötzlich Hunderte Dateien werden, steckt kein Fehler dahinter – im Gegenteil. Origins sorgt dafür, dass Sie auch mit unstrukturierten Punktwolken zuverlässig und strukturiert arbeiten können.
Sie sind unsicher, was im Hintergrund passiert? Oder möchten Ihren Workflow optimieren? Unser Support-Team steht jederzeit gern zur Seite.
Und wenn Sie tiefer in das Thema einsteigen möchten: In unserem Webinar erfahren Sie, wie strukturierte und unstrukturierte Punktwolken wirklich funktionieren – und worauf es bei der Verarbeitung ankommt.
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!

Im Rahmen eines studentischen Projekts an der HTW Dresden stellte sich Jannes, Student der Geomatik, der Frage: Wie genau ist der mobile Laserscanner L2 Pro von XGRIDS wirklich? Gemeinsam mit Laserscanning Europe entwickelte er einen umfassenden Testaufbau, um die absolute geometrische Genauigkeit des Scanners sowohl im Innen- als auch im Außenbereich zu überprüfen. Dabei spielten PointCab Origins und CloudCompare zentrale Rollen – für Auswertung, Visualisierung und Validierung.
Untersucht wurden:
Das Projekt drehte sich um die zentrale Frage:
Erfüllt der Scanner die vom Hersteller angegebene Genauigkeit von ±3 cm – und unter welchen Bedingungen?
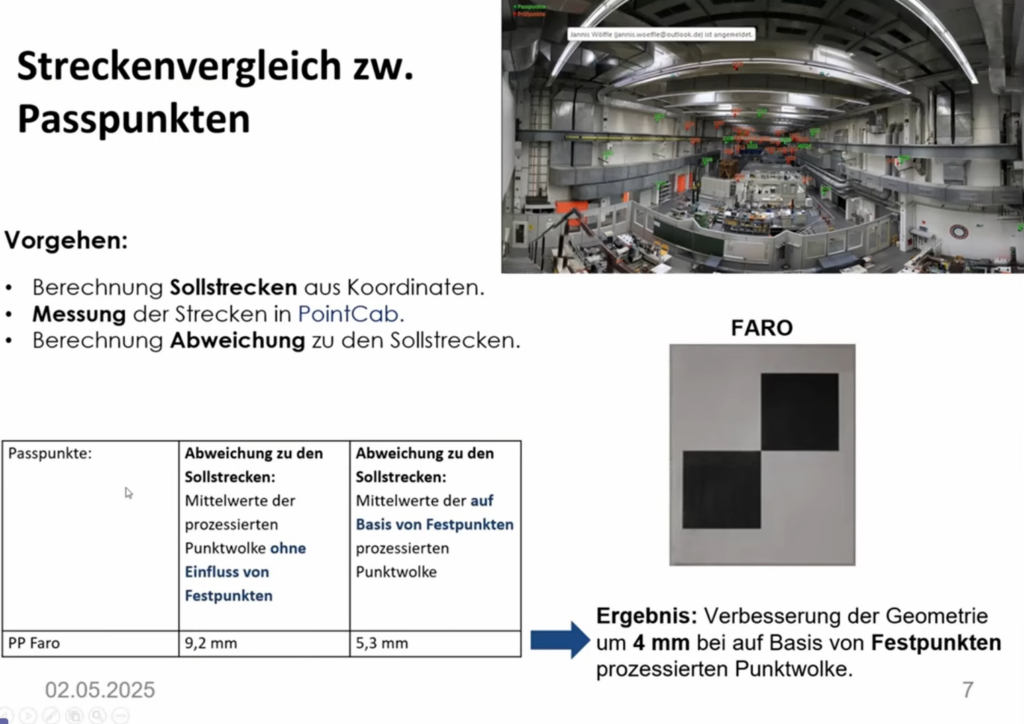
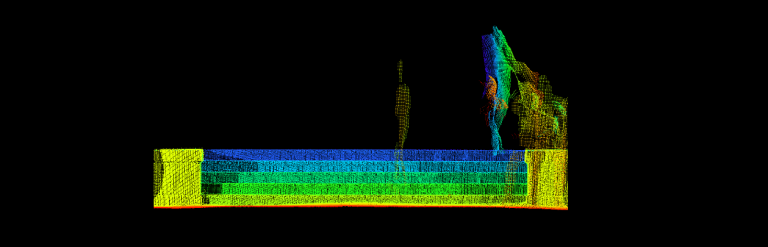
In einer Halle der HTW Dresden wurde der L2 Pro zunächst ohne, dann mit vier Festpunkten getestet. Verwendet wurden Faro-Schachbrettmarken mit bekannten 3D-Koordinaten, um Raumstrecken zu berechnen.
Ergebnisse:
Zusätzlich wurde die Höhengenauigkeit analysiert – ein bekanntes Problem bei mobilen Scannern. Der L2 Pro zeigte im Gegensatz zum kleineren K1 keine relevanten Höhenabweichungen, auch in kritischen Zonen
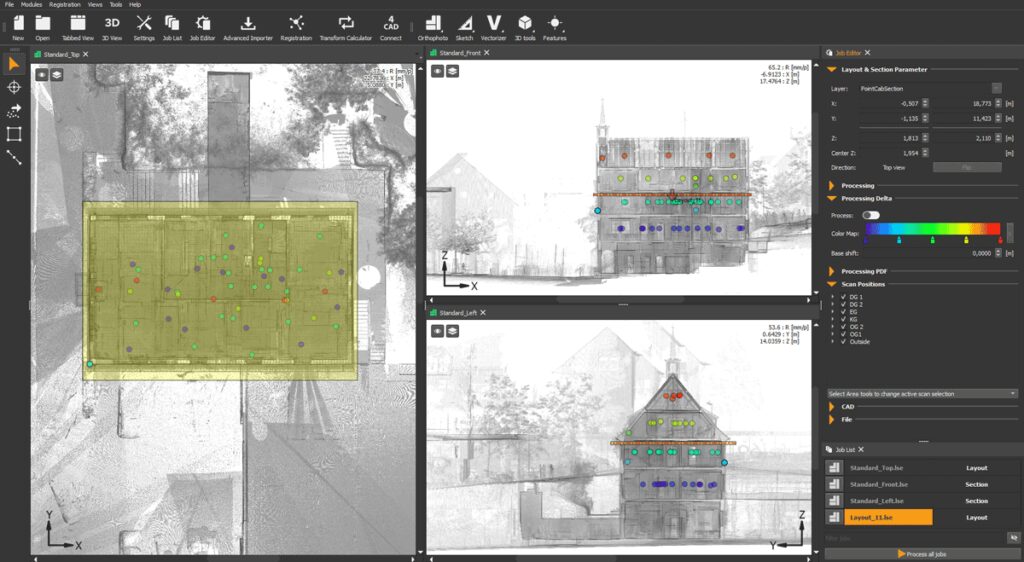
Für die Auswertung nutzte Jannes PointCab Origins, insbesondere für:
In mehreren Schnitten mit 5 mm Auflösung wurden kaum Abweichungen zwischen der L2-Pro-Wolke und der FARO-Referenz festgestellt. Nur an kritischen, reflektierenden Bauteilen (z. B. Lüftungskanal) kam es zu Differenzen um 2,9 cm – dennoch innerhalb der Hersteller-Spezifikation.
Auch Sebastian Zell, Geschäftsführer eines Berliner Spezialisten für Architekturaufmaß, unterstreicht die Bedeutung von PointCab Origins in der Qualitätssicherung:
„Wir nutzen PointCab Origins, um verlässlich und visuell nachvollziehbar zu überprüfen, ob unsere Punktwolken korrekt registriert sind – insbesondere bei Großprojekten.“
PointCab Origins überzeugte auch in diesem Projekt: Die Software erlaubt es, Abweichungen auf einen Blick zu erkennen – ein entscheidender Vorteil für eine sichere Weiterverarbeitung in CAD oder BIM.
Hier geht es zum Video mit Herrn Zell:
👉 Die perfekte Registrierung – Interview 1/3 | Punktwolken Software, Zielmarken, 3D-Laserscanner
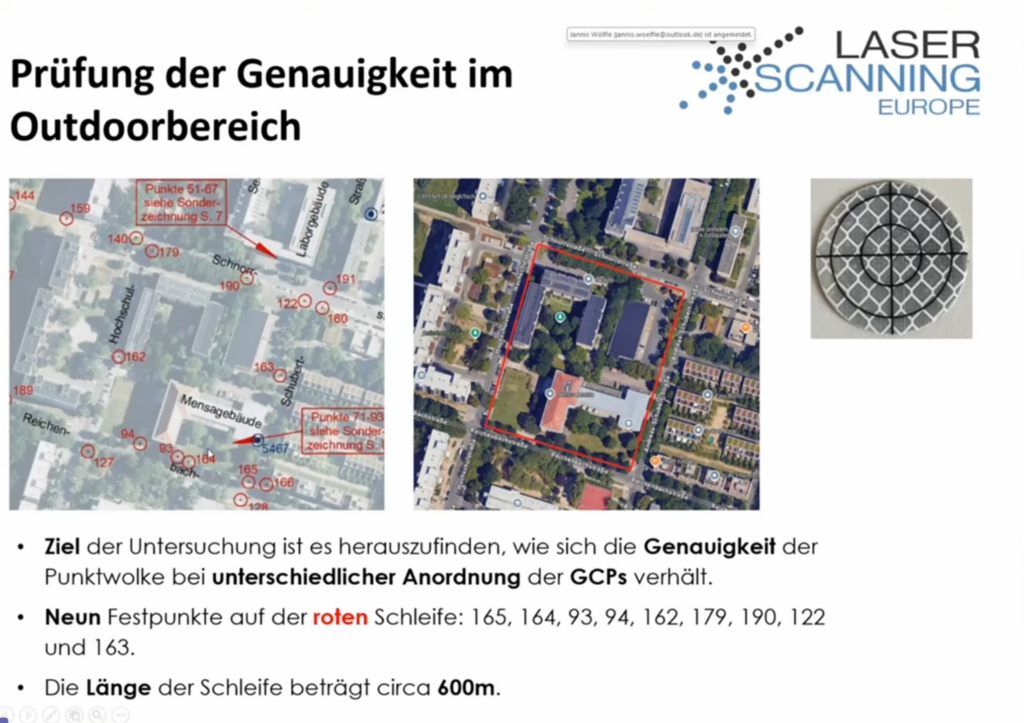
Ein Rundkurs von 600 m wurde mit dem L2 Pro erfasst, um den Einfluss der Verteilung von GCPs (Ground Control Points, also fest vermessenen Passpunkten im Gelände) zu testen:
Die Ergebnisse belegen: Eine strategische Platzierung der GCPs – also eine gleichmäßige und dichte Verteilung der bekannten Referenzpunkte im Gelände – ist entscheidend für die Gesamtgenauigkeit, insbesondere bei mobilen Scans mit SLAM-Technologie.
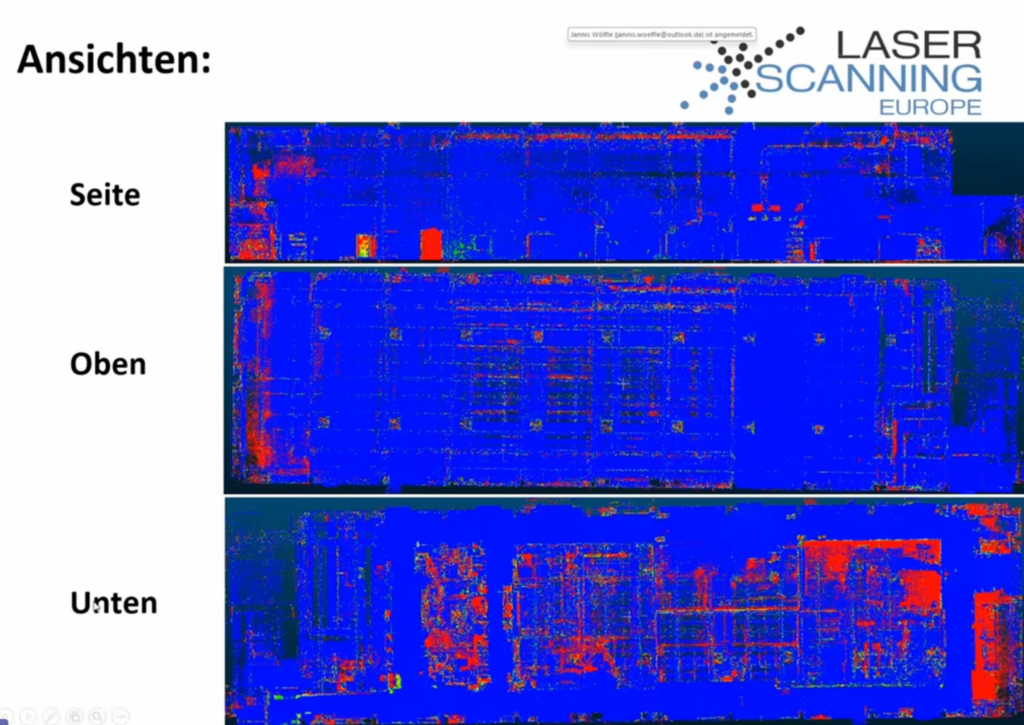
Ergänzend zu PointCab Origins kam CloudCompare zum Einsatz, um:
Ergebnis: Die Punktwolke des L2 Pro lag in weiten Bereichen deutlich unter der Herstellerangabe von 3 cm, vielfach sogar unter 1,5 cm – ein starkes Ergebnis, das den Scanner als geeignete Lösung für präzises Bestandsaufmaß bestätigt.
Das Projekt zeigt eindrucksvoll: Moderne Laserscanner wie der L2 Pro liefern bei korrektem Workflow sehr präzise Daten. Aber erst durch Werkzeuge wie PointCab Origins und CloudCompare wird sichtbar, wie zuverlässig diese Daten wirklich sind.
PointCab Origins bietet:
Wer präzise arbeiten will, muss seine Daten nicht nur erfassen – sondern auch richtig prüfen.
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!
Dieser Beitrag ist geschützt. Gib das unten stehende Passwort ein, um den Beitrag anzuzeigen!

As-built oder auf Deutsch “wie gebaut” – wer sich mit Architektur und Baubranche beschäftigt, wird früher oder später über diesen Begriff stolpern. Fast immer im Zusammenhang mit Dokumentation. Doch was umfasst eigentlich eine as-built Dokumentation? Wie wird sie erstellt und wozu wird sie benötigt?
Eine gesetzliche oder baurechtliche Definition des Begriffs gibt es nicht. Selbst innerhalb der Branche kann es unter Umständen zu verschiedenen Auffassungen kommen, wenn es um den Umfang einer as-built Dokumentation geht. Wir möchten trotzdem oder gerade deshalb versuchen alle Fragen rund um die as-built Dokumentation zu klären.
Wie eingangs erwähnt bedeutet as-built nichts anderes als “wie gebaut”. Entsprechend ist eine as-built Dokumentation eine Dokumentation des tatsächlichen IST-Zustandes. Eine Bauzeichnung hingegen zeigt den geplanten Zustand eines Bauprojekts. Wer bereits an einem Bauvorhaben beteiligt war weiß, das zwischen Planung und Ergebnis unter Umständen erhebliche Unterschiede entstehen können. Um schlussendlich eine realistische Dokumentation des Bauprojekts zu erhalten, ist es nötig zusätzlich zur Bauzeichnung eine as-built Dokumentation durchzuführen.
Ist es also sinnvoll einfach nach Beendigung des Projekts eine as-built Dokumentation anzufertigen? Natürlich sollte das fertige Projekt vollumfänglich erfasst werden. Noch besser ist es allerdings schon viel früher anzusetzen. Es empfiehlt sich gerade bei größeren Projekten die verschiedenen Etappen des Baufortschritts zu dokumentieren. Dies hat gleich mehrere Gründe. Zum einen lassen sich so alle Beteiligten über den Baufortschritt auf dem Laufenden halten.

Noch viel wichtiger ist allerdings der Abgleich mit der Bauzeichnung und der Planung. So können schon frühzeitig mögliche Komplikationen erkannt und entsprechend umgeplant werden. Nach jedem Bauschritt können gegebenenfalls Kosten angepasst, neue Genehmigungen eingeholt, Materialien ausgetauscht, die Statik berechnet werden und vieles mehr. So lassen sich böse Überraschungen und Kostenexplosionen besser vermeiden.
Natürlich sollte auch nach Abschluss des Projekts noch eine finale as-built Dokumentation durchgeführt werden und auch bei bereits bestehenden Strukturen lohnt sich die Erfassung. Auf Grundlage der as-built Dokumentation können nämlich spätere Umbaumaßnahmen oder Installationen geplant und durchgeführt werden. Zusätzlich liefert sie bei Bedarf wichtige Informationen für Katastrophenschutz und Rettungskräfte.
Der Sinn und Zweck einer as-built Dokumentation ist soweit also klar. Die nächste Frage die sich nun stellt ist, wie diese überhaupt angefertigt wird und was genau sie eigentlich enthalten sollte. Egal ob der Baufortschritt dokumentiert werden soll oder ein bereits abgeschlossenes Projekt, als erstes muss ein Aufmaß erstellt werden. Dies geschieht heutzutage je nach Größe des Projekts mittels Laserscanning und/oder Drohnenbefliegung.
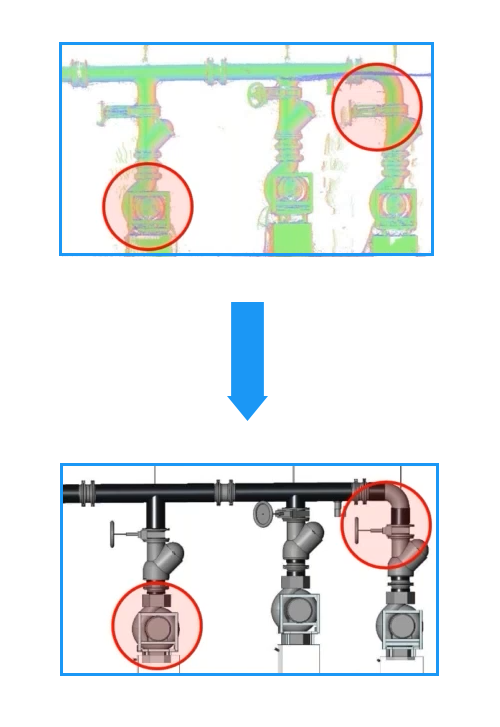
Arbeitet man mit einem Laserscanner, gibt dieser eine Punktwolke aus, die zunächst mit einer spezieller Software verarbeitet und ausgewertet werden muss. Auch aus Drohnenbefliegungen lassen sich mit spezieller Software, wie Pix4D Punktwolken generieren. Mit unserer Origins Software können aus den Punktwolkendaten zum Beispiel schnell Schnitte, Grundrisse und vieles mehr erstellt werden. Die so aufbereiteten Daten können anschließend ins CAD-System eingelesen werden, wo ein Modell des Projekts erstellt wird.
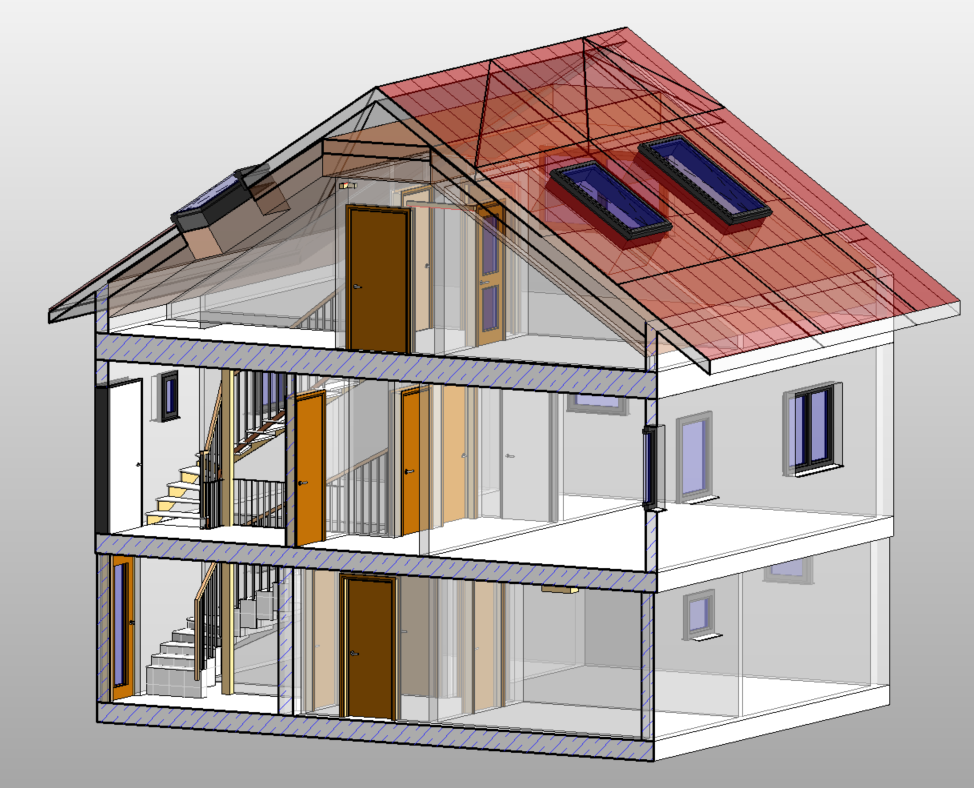
Doch ein Aufmaß und ein einfaches 3D-Modell sind oft nicht ausreichend für eine as-built Dokumentation. Je nach Anforderung müssen noch weitere Informationen in der Dokumentation festgehalten werden und auch bei der Erstellung des 3D-Modells gibt es je nach Anforderungen viel zu beachten.
So spielt bei der Modellierung unter anderem der Level of Detail, kurz LOD eine wichtige Rolle. Sollen beispielsweise Armaturen bei Wasseranlagen bis ins kleinste Detail nachmodelliert werden oder ist es ausreichend diese in der korrekten Position und Lage grob darzustellen? Solche Fragen sollten bereits von dem Erstellen der Dokumentation geklärt und mit dem Modellierer abgesprochen werden. Dieser kann im persönlichen Gespräch feststellen, welcher LOD-Grad für ihr Projekt benötigt wird. Einen Industriestandard für die Genauigkeit bei as-built Dokumentationen gibt es nämlich nicht. Das liegt nicht zuletzt daran, dass eine höhere Genauigkeit mit Mehrkosten verbunden ist, die man natürlich nicht tragen möchte, wenn sie gar nicht benötigt wird.
Ein weiterer Punkt der unbedingt beachtet werden muss, sind die Zusatzinformationen. Soll beispielsweise auch dokumentiert werden aus welchem Material der Boden, die Türen, Fenster etc. sind? Um welches Fenster-Modell es sich handelt? Sollen Rechnungen und Statiknachweise hinterlegt werden? Auch diese Fragen müssen vor der Anfertigung einer as-built Dokumentation geklärt und der Umfang festgelegt werden.
Schlussendlich hängt also der Umfang und die Genauigkeit einer as-built Dokumentation immer von den individuellen Anforderungen ab. Allgemein lässt sich aber sagen, dass zumindest eine grobe digitale Erfassung mittels Laserscanning immer sinnvoll ist. So lassen sich Fehler in der Bauphase vermeiden und mögliche nachträgliche Bauarbeiten leichter umsetzen.
Haben Sie noch weitere Fragen zur as-built Dokumentation oder zur Punktwolkenauswertung?
Dann schreiben Sie uns oder rufen Sie uns an: +49(0)71539295930.
Unser Support-Team berät Sie gerne!

Hier findet ihr als Einsteiger eine leicht verständliche Einführung zu Thema Punktwolken. Wir beantworten euch folgende Fragen:
Grundwissen: Was ist eine Punktwolke?
Wozu werden Punktwolken verwendet?
Wie arbeitet man mit Punktwolken?
Punktwolkenregistrierung
Einlesen, Verarbeiten und Weitergeben von Punktwolken

Was eine Punktwolke (engl. point cloud) ist, lässt sich am einfachsten mit Hilfe eines „Gadgets“ erklären, dass in den 00er Jahren den Höhepunkt seiner Popularität erreicht hat und heute vorrangig für Präsentationen eingesetzt wird: der Laserpointer.
Mit dem Laserpointer lässt sich in einer geraden Linie ein exakter Punkt anstrahlen. Wenn man nun weiß, wo genau im Raum sich der Laserpointer befindet, lässt sich auch genau bestimmen wo der Punkt liegt, der angestrahlt wird. Der Laserstrahl ist schließlich kerzengerade und ermöglicht es so, die exakte Position des Punktes im Raum in Relation zum Ursprung (dem Laserpointer) zu berechnen. Nach diesem Grundprinzip, nur ein wenig komplexer, werden auch geodätische Punkte im Vermessungswesen gemessen. Anstelle eines Laserpointers werden dafür spezielle Tachymeter eingesetzt.
Und was hat das jetzt mit Punktwolken zu tun? Ganz einfach. Neben Tachymetern werden zur Vermessung in den letzten Jahren immer häufiger Laserscanner eingesetzt. Auch diese arbeiten grundsätzlich wie unser Laserpointer, nur können sie tausende oder sogar Millionen Punkte gleichzeitig messen. Zusammengenommen bilden alle gemessenen Punkte also die Punktwolke.

Punktwolken enthalten unglaublich viele Informationen, denn jeder einzelne Punkt in der Punktwolke hat seine eigenen X,Y und Z Koordinaten. Scannen wir also z.B. eine Treppe mit einem Laserscanner, können wir mit Hilfe der entstandenen Punktwolke genau bestimmen, wie gerade die einzelnen Stufen sind, an welchen Stellen die Treppenstufen abgenutzt sind und wie hoch die Abweichung von der Baunorm ist. Entsprechend kommen Laserscanner und die Punktwolken die sie produzieren immer dann zum Einsatz, wenn man bestehende Strukturen genau dokumentieren möchte, um sie beispielsweise zu digitalisieren, zu vermessen oder zu verändern.
Bei der Konstruktion und Optimierung von Produktionsteilen, beispielsweise in der Autoindustrie, werden meistens sehr hochauflösende Handscanner eingesetzt, die selbst kleinste Details und Abweichungen erfassen. So lässt sich am PC ein digitaler Zwilling erstellen. Mit Hilfe des Zwillings können dann neue Prototypen erstellt und Verbesserungen digital simuliert und getestet werden.
In der Baubranche und Bestandsdokumentation von Gebäuden kommen verschiedene Scanner zum Einsatz. Je nach Objekt meistens terrestrische oder mobile Laserscanner und manchmal sogar Drohnen. Mit Ihnen werden Gebäude aus den verschiedensten Gründen gescannt, z.B. um einen Anbau oder eine Renovierung zu planen, um neue Anlagen in Produktionsgebäuden optimal zu platzieren oder den Baufortschritt von verschiedenen Bauprojekten zu dokumentieren.
Dies sind nur einige Anwendungsbeispiele. Überall dort, wo Objekte genau erfasst und digitalisiert werden müssen kommen Punktwolken zum Einsatz. Je nach Anwendungsgebiet werden dabei verschiedene Laserscanner verwendet, die verschiedene Genauigkeiten und Punktwolkengrößen produzieren.
Wie man am besten mit Punktwolken arbeitet, hängt vor allem davon ab, welches Ziel man verfolgt. Wie bereits erwähnt kommen verschiedene Laserscanner für verschiedene Anwendungsgebiete zum Einsatz. Ähnlich verhält es sich auch mit der Software, die zur Auswertung der Punktwolken verwendet wird. Unsere Softwarelösung Origins wird beispielsweise verstärkt dort eingesetzt, wo bestehende Gebäude- oder Landschaftsstrukturen digital erfasst werden sollen.
Unabhängig davon, welche Hard- und Softwarelösungen zum Einsatz kommen steht allerdings zwischen der Erfassung und der Auswertung der Punktwolkendaten ein wichtiger Schritt: die Registrierung.
Bei der Registrierung werden einzelne Scans oder auch einzelne “Ausschnitte” die mit dem Laserscanner erfasst wurden, zu einer Punktwolke zusammengefügt. Möchte man beispielsweise ein komplettes Gebäude erfassen, geht man oft so vor, dass man den Laserscanner in den verschiedenen Räumen aufstellt und diese abscannt. Natürlich möchte man aber nicht nur einzelne Scans von den verschiedenen Räumen haben, sondern eine große Punktwolke, in denen alle Scans vorhanden und miteinander verknüpft sind. Um dies zu erreichen, muss man die Scans registrieren. Hinter der Registrierung steckt meist ein ziemlich komplizierter mathematischer Prozess. Die Genauigkeit der Daten die aus der Registrierung hervorgehen hängt dabei davon ab, wie gut vor Ort mit dem Laserscanner gescannt wurde und wie gut die verwendete Registrierungssoftware ist.
Glücklicherweise ist dieser Prozess in den letzten Jahren immer einfacher geworden. Setzt man beispielsweise einen mobilen Laserscanner ein, muss man oft keine einzelnen Scans mehr vornehmen und kann mit dem Scanner einfach durch oder um das zu scannende Objekt laufen. Auch die Registrierung erfolgt bei dieser Art von Scanner meist vollautomatisch ab und wird zusammen mit der Hardware bereitgestellt. Der Anwender benötigt nicht viel Hintergrundwissen. Nachteil ist hier allerdings, dass mobile Laserscanner momentan oft noch nicht so präzise Ergebnisse liefern können, wie terrestrische Laserscanner, also Scanner, die stationär aufgebaut werden und nacheinander einzelne Scans aufnehmen.
Um eine Punktwolke zu registrieren, gibt es verschiedene Methoden. Die bekanntesten sind die Cloud-to-Cloud Registrierung, die target-basierte Registrierung oder die Plane-to-Plane Registrierung. Welche Methode man einsetzt hängt von vielen verschiedenen Faktoren ab, z.B. dem eingesetzten Laserscanner, der gewünschten Genauigkeit oder auch von den eigenen Präferenzen. Gerade als Neuling empfiehlt es sich deshalb, das Scannen und Registrieren von Experten durchführen zu lassen. Diese registrieren die Punktwolke nicht nur, sie “säubern” sie in den meisten Fällen während dem Registrierungsprozess auch zusätzlich. Das bedeutet, dass z.B. doppelte Scans oder “verrauschte” Bereiche der Punktwolke entfernt werden oder die Punktwolke professionell “ausgedünnt” wird, um die Dateigröße zu reduzieren.
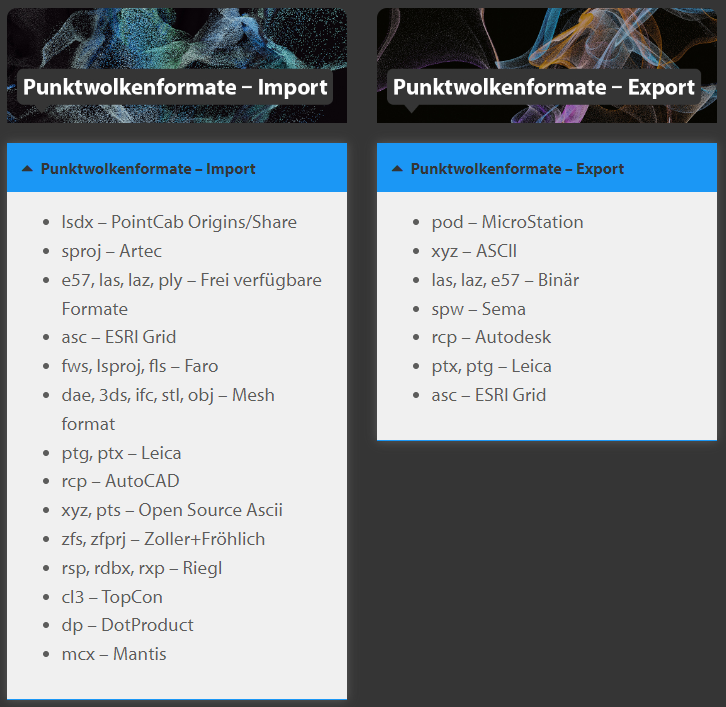
Wir sind sehr stolz, dass unsere Origins Software über 25 verschiedene Punktwolkenformate einlesen und über 20 verschiedene Formate (Punktwolkenformate und andere) exportieren kann. Doch obwohl wir damit eine der größten Vielfalten auf dem Markt bieten, sind immer noch nicht alle nativen Datenformate abgebildet. Wie geht man also am besten mit den verschiedenen Dateiformaten um?
Eine Lösung bieten offene Austauschformate wie .las, .laz, .e57 oder .xyz. Diese Dateiformate wurden von unabhängigen Stellen entwickelt, um die Problematik der Datenweitergabe zu lösen. Besonders das .e57-Format hat sich dabei quasi zum Industriestandard entwickelt. So können so gut wie alle Registrierungssoftwares der Laserscanner-Hersteller das Format ausgeben und Verarbeitungssoftwares für Punktwolken das Format auch einlesen. Deswegen erhält man vom Vermesser in den meisten Fällen auch die Punktwolke im .e57-Format.
Um sich diesen Aufwand zu ersparen, werden die Daten oft deswegen zuerst in einer Punktwolkensoftware vor-verarbeitet und dann in der CAD Software weiter verarbeitet. So kann man beispielsweise mit Origins Grundrisse und Vektorlinien erstellen, die dann lagerichtig und mit allen wichtigen 3D-Informationen im .dfx- oder .dwg-Format an die CAD Software übergeben werden können. Diese Formate können von nahezu jeder CAD Software verarbeitet werden und benötigen ein vielfaches weniger an Speicherkapazität, als die gesamte Punktwolke. Natürlich gibt es für die größten CAD Softwares inzwischen auch Plugins, welche die 3D-Informationen aus der Punktwolke von der Punktwolkensoftware direkt in die CAD Software übertragen können.
Schlussendlich zeigt sich also, dass die Erfassung und Verarbeitung von Punktwolken, bis hin zur Erstellung eines 3D-Modells immer noch viel Expertise und Know-How erfordern. Besonders die Datenmengen und der Datenaustausch zwischen den verschiedenen Systemen stellt immer noch eine Herausforderung dar. Glücklicherweise wurde hier in den letzten Jahren schon einiges getan, um diesen Prozess, auch bekannt als Scan-to-BIM, zu vereinfachen. Auch wir arbeiten täglich daran, mehr Datenformate in unserer Software abbilden zu können und die Handhabung so zu vereinfachen, dass auch Neueinsteiger mit Punktwolken arbeiten können.
Haben Sie noch weitere Fragen zum Thema Punktwolken oder möchten Sie unsere Software einmal selbst testen? Schreiben Sie uns gerne eine E-Mail an: support@pointcab-software.com. Gerne beraten wir Sie unverbindlich in einem persönlichen Gespräch.
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!

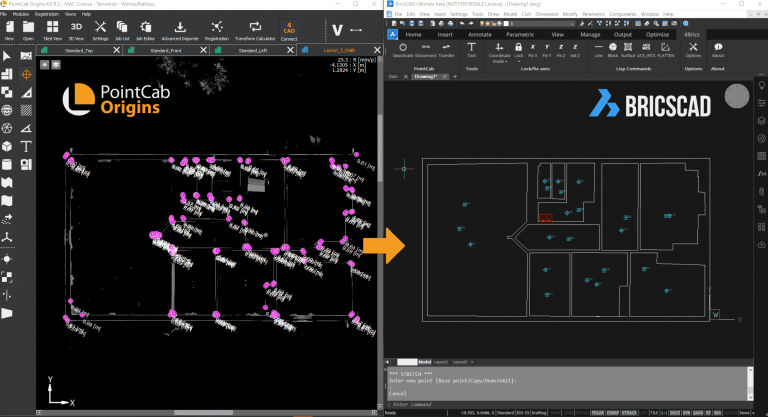
Nachdem wir bereits seit Jahren Punktwolken-Plugins für Revit und Archicad anbieten, können wir nun mit Freude verkünden, auch die Punktwolken-Modellierung für BricsCAD mit einem Plugin zu vereinfachen. Die Entscheidung für ein BricsCAD-Plugin fiel uns leicht. Schon seit Monaten kamen immer mehr Kunden und Interessenten auf uns zu und fragten danach. Wer unser Team kennt weiß, dass wir immer versuchen Kundenwünsche so schnell wie möglich umzusetzen und auf Nachfragen zu reagieren. So ist es also nicht weiter verwunderlich, dass wir uns direkt an die Arbeit gemacht haben, nachdem die ersten Anfragen eingingen.

Wir sind Programmierer und Punktwolken-Profis. Wir sind keine BricsCAD-Experten und das geben wir auch offen zu. Entsprechend haben wir auch bei der Entwicklung unseres BricsCAD-Plugins das gemacht, was wir in solchen Fällen immer tun – das Fachwissen unserer Kunden heranziehen. So haben wir über Monate hinweg die BricsCAD-Software und den Workflow unserer BricsCAD-User studiert. Besonders hervorzuheben ist an dieser Stelle Sebastian Zell, der sich massiv in allen Entwicklungsschritten von der Konzeption bis hin zum Beta-Test beteiligt hat. Das Ergebnis ist ein Plugin, dass perfekt auf die Arbeitsweise unserer BricsCAD-Kunden und die Architektur der BricsCAD-Software abgestimmt ist.
Unser 4Brics Plugin hilft Ihnen dabei, 3D-Informationen lagerichtig und in Echtzeit von Origins nach BricsCAD zu übertragen. So müssen Sie weder die gesamte Punktwolke noch einzelne Orthophotos erst exportieren und dann in BricsCAD importieren. Wie bereits erwähnt, haben wir unser Plugin auf die Architektur und den Aufbau der BricsCAD Software abgestimmt. Deswegen gibt es die Funktion Achsen zu fixieren. Es können prinzipiell einzelne oder mehrere Achsen gleichzeitig fixiert werden, je nachdem was gerade benötigt wird. So lassen sich z.B. die x und y Achse fixieren, wenn Höhen bestimmt werden sollen. Gemessen wird dabei allgemein mit dem 3D-Punkt-Werkzeug in Origins. Egal ob Linien, Oberflächen oder individuelle Objekte aus eigenen Vorlagen übertragen werden sollen – einfach das gewünschte Element in Origins klicken und schon wird es lagerichtig nach BricsCAD übertragen. Wie gewohnt lässt sich das 3d-Punkt-Werkzeug in den Standardansichten, Grundrissen oder Panorama-Ansichten verwenden. Egal welche Ansicht Sie nutzen, die Informationen aus der Punktwolke werden immer korrekt nach BricsCAD übertragen. Neben dem Transfer von 3D-Punktwolkendaten, haben wir noch weitere Funktionen implementiert, die Ihnen das Arbeiten in BricsCAD erleichtern. So können mit unserem Multilinien-Werkzeug mehrere einzelne Linien nacheinander und ohne Unterbrechung erstellt werden. Auch das Aufbereiten Ihrer Daten für andere CAD-Software ist mit wenigen Klicks erledigt. So können Sie beispielsweise die Daten von Ihrem Benutzer-Koordinatensystem, in das Welt-Koordinatensystem übertragen oder die Höhen abflachen. Dadurch können die Daten auch in CAD-Softwares wie Revit oder ArchiCAD eingelesen werden.
Wenn Sie jetzt neugierig geworden sind, dann schauen Sie sich doch unser Übersichtsvideo an oder besuchen Sie direkt unseren Shop.

