Mit dem Nebula Creator haben jetzt endlich ALLE die Möglichkeit Nebula kostenlos zu nutzen – egal ob Origins bereits eingesetzt wird oder nicht. Der Creator ist ein kostenloses Desktop-Tool mit dem Punktwolkenprojekte für die Online-Visualisierung in Nebula vorbereitet werden.
So funktioniert’s Creator herunterladen. Punktwolken-Daten konvertieren und ggf. Panos hinzufügen. Danach ganz normal dem Nebula Worklow folgen. Fertig!
Wie versprochen erweitern wir die Anzahl an Clouds, die sich mit Nebula verbinden lassen. Auf Grund der großen Nachfrage haben wir mit diesem Update AWS angebunden.
So funktioniert’s Im Video zeigen wir Schritt für Schritt, wie man seine AWS auch ohne großes IT-Wissen mit Nebula verbindet. Die Kurzfassung? Einfach den Anweisungen in Nebula folgen.
Neuer Download Manager
Nutzen & Mehrwert
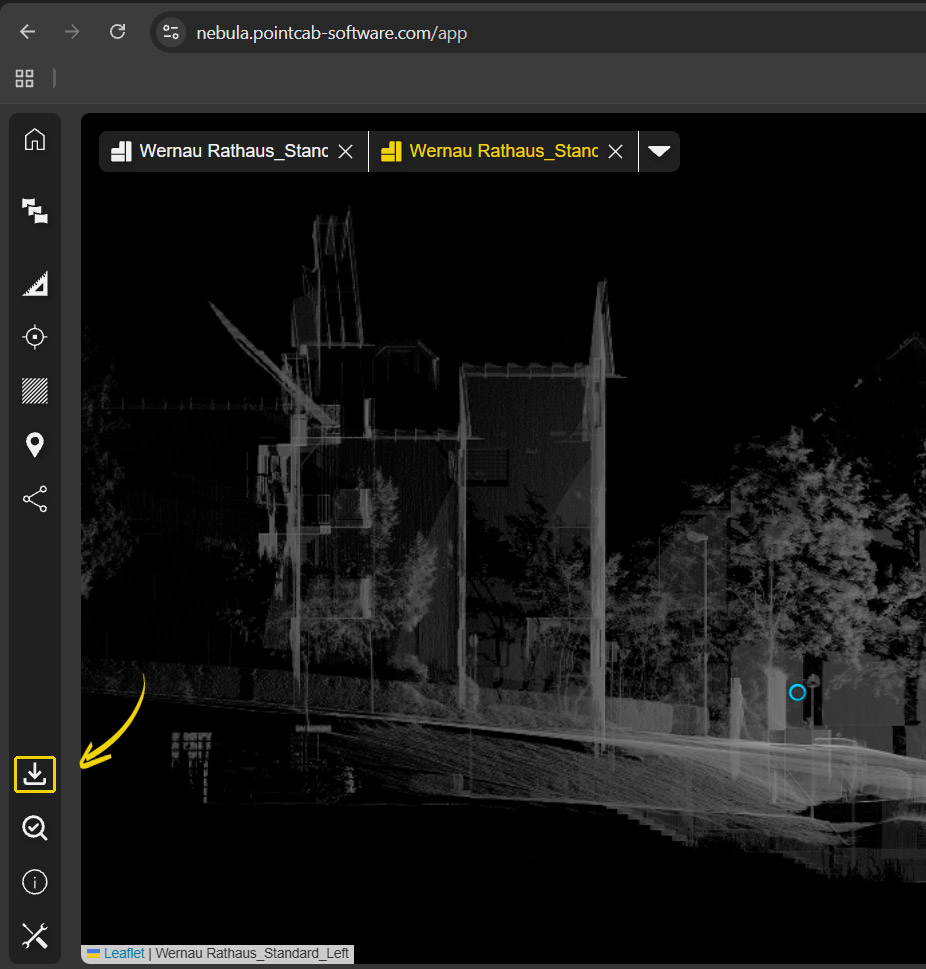
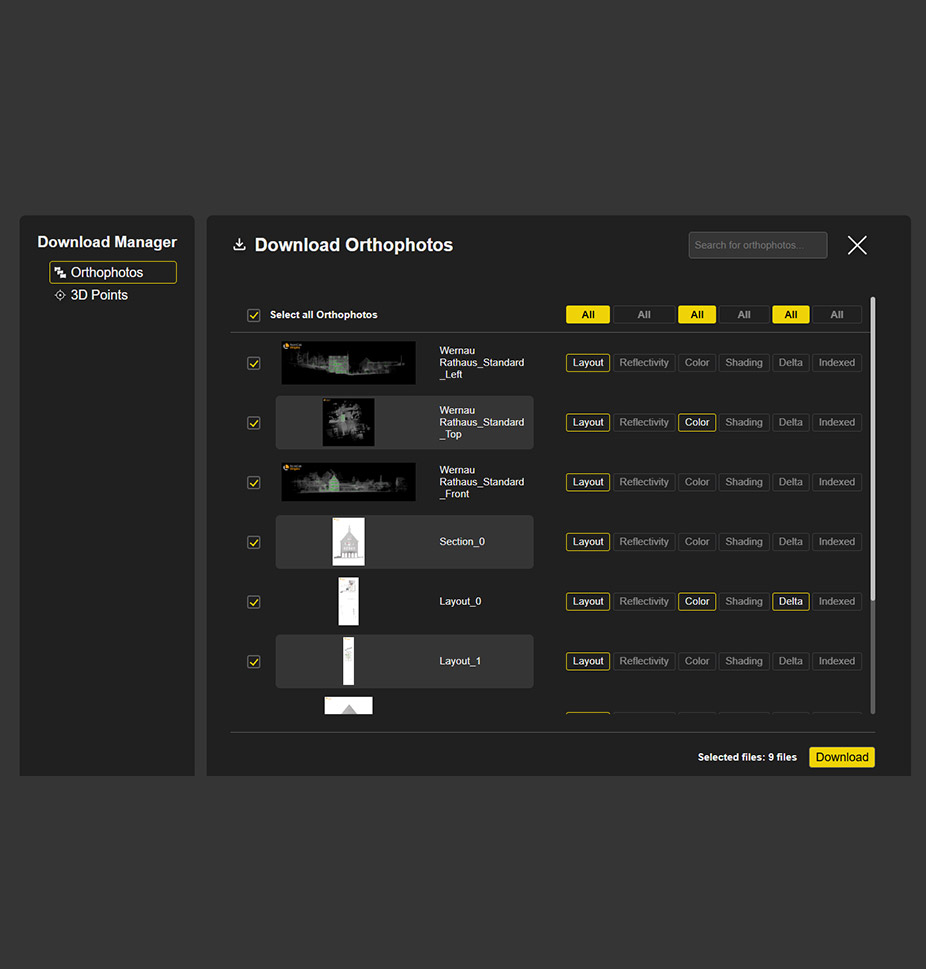
Unser neuer Downloadmanager ermöglicht es nun Orthofotos und 3D Punkte direkt im Browser herunterzuladen – eine lang erwartete Funktion. So können sie Ergebnisse nicht nur visualisieren sondern auch direkt und einfach weitergeben.
So funktioniert’s Download-Manager im Menü unten links anklicken. Im neuen Fenster gewünschte Orthofotos oder 3D Punkte anwählen. Über „ALL“ lassen sich direkt alle verfügbaren Dateien anwählen. Zuletzt einfach auf Download klicken – fertig.
Höhen- und Cluster Navigation
Nutzen & Mehrwert
Damit die Navigation in Nebula noch intuitiver funktioniert, können Scanpositionen jetzt nach Höhe oder Cluster gefiltert und angezeigt werden.
So funktioniert’s Im Video gibt’s eine ausführliche Anleitung. Die Kurzfassung? Einfach nach Höhe oder Cluster filtern und dann Scanpositionen nach belieben ein- oder ausblenden.
"Display Range" Option in Bubble Views
Nutzen & Mehrwert
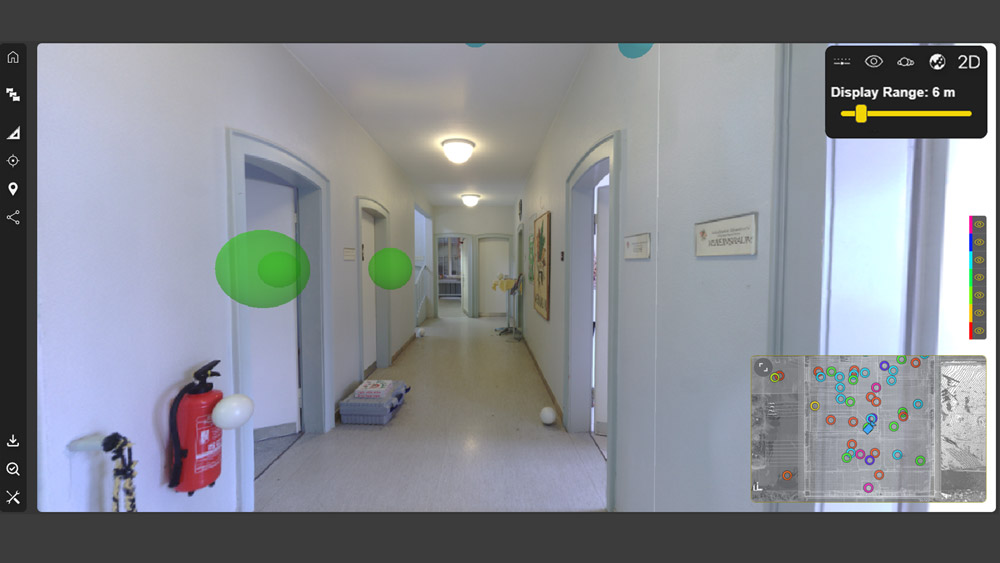
Die perfekte Eränzung zur neuen Höhen- und Cluster-Navigation! Die „Display Range“ Funktion bietet die Möglichkeit Scanpositionen in Bezug auf die Entferung zum eigenen Standpunkt im Bubble View ein- oder auszublenden.
So funktioniert’s Einfach im Menü oben rechts auswählen, ab welcher Entfernung Scanpositionen angezeigt werden sollen.
Messungen & POIs im Bubble Views
Nutzen & Mehrwert
Eine weitere tolle Funktion für den Bubble View. Jetzt können auch im Bubble View Messungen erstellt und POIs werden!
So funktioniert’s Schnell die Koordinaten herunterladen und schon können per Strg + Mausklick Strecken und 3D Punkte gemessen werden. Natürlich können auch POIs mit z.B. weiteren Links und Dokumentation hinterlegt werden.
3. Nebula 2.1 – Weitere Neuerungen
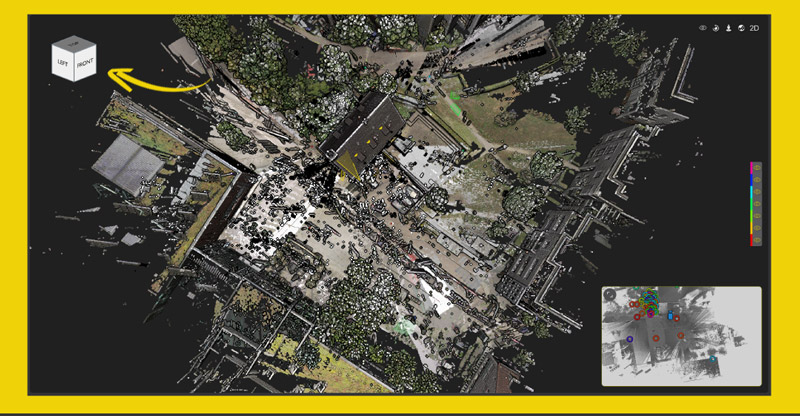
Würfel Navigation im 3D Viewer
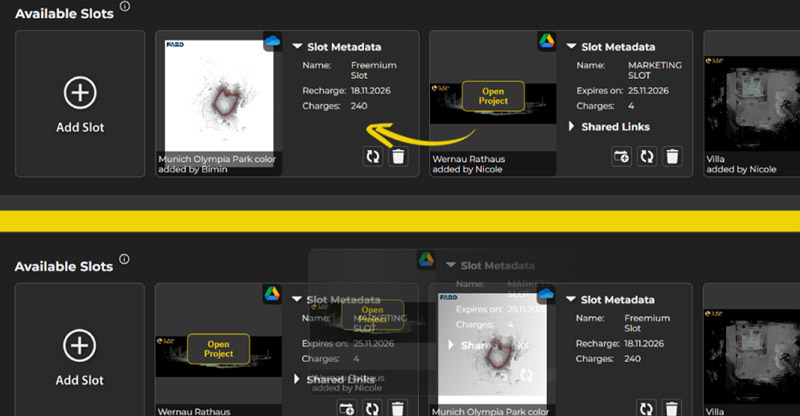
Slots neu anordnen
Neue Einstellung für Scans - Bubble oder Planar
4. Nebula 2.1 – Verbesserungen und Fixes
Verbesserte Handhabung der Clipping-Box
Verbessertes Verhalten und Erscheinungsbild der Einstellungen
Verbesserter Workflow für den Kauf zusätzlicher Slots
Verbesserte 3D-Visualisierung
Verbesserte Mini-Map für einfachere Navigation
Erweiterte Maßeinheiten (Fuß)
Dynamische Anpassung der Punktanzeige für verbesserte Leistung
Optimiertes Laden der Punktwolke für schnellere Leistung
Fix: Änderungen werden in Echtzeit synchronisiert
Fix: Einheitliche Freigabelinks für alle Benutzer
Fix: Automatische Aktualisierung von public Links
Fix: Public Links in Microsoft SharePoint
Fix: Probleme mit der Seitenleiste in Firefox
Heute noch Demo buchen
Möchten Sie diese neuen Funktionen besser kennenlernen?
Buchen Sie einfach eine kostenlose, unverbindliche Demo mit einem unserer Support-Engineers.
Sie wollen immer auf dem neusten stand bleiben?
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!
Das Jahr 2025 neigt sich dem Ende zu, und wir bei PointCab blicken mit gemischten Gefühlen auf ein Jahr zurück, das wir sicherlich alle noch nicht ganz verdaut haben. Neben den Erfolgen, Produkt-Updates und vielen Events müssen wir dieses Jahr leider auch auf Ereignisse zurückblicken, die nach wie vor schwer auf unseren Herzen lasten. Blicken wir gemeinsam auf die wichtigsten Ereignisse zurück:
RELEASES FÜR EINEN ZUKUNFTSSICHEREN WORKFLOW
2025 war ein Jahr voller neuer Updates und Verbesserungen unserer Produktpalette. Hier auf einen Blick die wichtigsten Updates aus unserem Changelog:
Origins 4.2 Updates: Neben stetigen Verbesserungen, dem Erweitern der Kompatibilitäten neuer Datenformate, kamen viele neue Funktionen hinzu und Kundenwünsche wurden realisiert, um unsere Punktwolkensoftware Origins noch besser und intuitiver zu machen.
Nebula 2.0: Unsere Cloud-Lösung für Punktwolkenprojekte hat ein großes Update erhalten. Neben vielen neuen Funktionen wurde vor allem die Handhabung noch einfacher und übersichtlicher gestaltet. Punktwolken zu teilen, war nie so leicht.
Punktwolken Plugins Update 3.0: 4AutoCAD, 4ArchiCAD, 4Brics, 4Revit, & 4ZWCAD Mit dem Update auf Version 3.0 haben all unsere Punktwolken-Plugins eine neue Import-Oberfläche bekommen und sind so intuitiver und leichter zu handhaben. Natürlich sind sie jeweils mit der jeweiligen neusten CAD-Software kompatibel. Unser neuestes Update von 4ArchiCAD 3.0 beinhaltet z.B. viele neue Funktionen: Import multipler Folien, transparente Orthophotos, XYZ-Daten als 3D-Punkte importieren und die neue Update Mesh Funktion.
EIN JAHR VOLLER BEGEGNUNGEN – EVENTS,
NEUE PARTNER & RESELLER
2025 war ein Jahr voller Begegnungen – vor Ort und online. Auf der GeoWeek in Denver, begleitet von spannenden Live-Sessions mit Mack (LIDAholics), den Oldenburger BIM- & 3D-Tagen, der LSE-Roadshow unserer Schwesterfirma in Stuttgart, den Energie-Exzellenz-Tagen und Highlights der Branche wie die Intergeo in Frankfurt konnten wir unsere Lösungen präsentieren, direkt mit Anwendern sprechen und klare Marktimpulse mitnehmen.
Auch online hat sich viel bewegt. Unsere Webinare zur neuen Cloud-Lösung Nebula 2.0 haben eine große Resonanz ausgelöst und gezeigt, wie hoch der Bedarf an skalierbaren, modernen Workflows ist.
Partnerschaft blieb ein zentrales Thema. Mit neuen Partnerschaften wie dem XGRIDS-Bundle mit Laserscanning Europe und Seiler Design Solutions in den USA sowie neuen Resellern wie GEOsat sind wir 2025 noch breiter aufgestellt und näher an unseren Kunden als je zuvor.
ABSCHIED UND WANDEL
Ein herber Schicksalsschlag erschütterte uns in diesem Jahr. Mit großer Trauer mussten wir von unserem geschätzten CEO und Mitgründer Dr. Richard Steffen Abschied nehmen. Nach einem jahrelangen Kampf gegen den Krebs verstarb unser Freund und CEO Richard im Sommer friedlich im Kreis seiner Familie. Nachruf Richard Richards langjähriger Freund und Geschäftspartner Eric Bergholz übernahm anschließend auf seinen Wunsch hin die Führung als neuer CEO von PointCab. Eine lange und tiefe Freundschaft verband Eric und Richard seit der Firmengründung von PointCab. Mit Eric, der außerdem auch CEO unserer Schwesterfirma Laserscanning Europe ist, liegt unsere gemeinsame Zukunft in guten Händen und wird ganz im Sinne Richards fortgeführt.
GEMEINSAM IN DIE ZUKUNFT
Zusätzlich zu unseren beruflichen Highlights stand 2025 für uns im Zeichen echter Team-Momente. Unser Teambuilding im sonnigen Valencia war ein echtes Highlight, das noch lange nachwirkt. Diese Energie fließt auch in unsere tägliche Zusammenarbeit ein – und macht unser Team zu dem, was es ist: der Motor unseres Erfolgs.
Wenn du dieses Umfeld verstärken möchtest, freuen wir uns auf deine Bewerbung als Technical Product Manager mit Customer Success Focus. Lass uns gemeinsam ins neue Jahr starten. Wir verabschieden uns von 2025 und blicken voller Tatendrang auf ein 2026, das Innovation und Teamgeist in den Mittelpunkt stellt.
WAS BLEIBT NOCH ZU SAGEN?
DANKE!
2025 war trotz aller schweren und emotional nur schwer zu verarbeitenden Momente ein starkes Jahr voller Wachstums, Fortschritts und echter Erfolge. Wir sind dankbar für alle Kunden, Partner, Teammitglieder und Freunde, die uns in diesem schweren Jahr zur Seite gestanden haben. Die große Anteilnahme, die wir von allen Seiten erfahren haben, hat uns viel Kraft und Unterstützung gegeben. Eure Anteilnahme hat uns alle tief berührt und geholfen, weiterzumachen. Vielen Dank für jeden Zuspruch, jedes Gespräch und euren Beistand!
Vielen Dank an alle, die Teil der PointCab-Familie sind. Auf ein erfolgreiches und inspirierendes Jahr 2026!
Die neue Version 3.0 vom PointCab 4Archicad Plugin ist da! Mit dem Update kommen einige neue Funktionen und Verbesserungen hinzu, die das Arbeiten mit Punktwolkendaten aus Origins in Archicad deutlich effizienter, intuitiver und einfacher machen.
POINTCAB 4ARCHICAD 3.0 – DAS IST NEU
IMPORT MULTIPLER FOLIEN
Neue Option in unserem 4Archicad Plugin:
Mit der neuen Einstellung „import all sheets as worksheets“ können nun Grundrisse mit Reflektivität, Delta, Index und mehr ganz einfach in einem Schritt übertragen werden.
Wie das genau funktioniert, zeigen wir im Video.
ORTHOPHOTOS TRANSPARENT SETZEN
Neue Funktion in unserem 4Archicad Plugin:
Mit der neuen Funktion „Set orthophotos transparent“ können Orthophotos jetzt transparent platziert werden. Ganz ohne einen weißen Hintergrund und das Gittermuster dahinter ist klar erkennbar.
Wie das genau funktioniert, zeigen wir im Video.
IMPORT XYZ-DATEN ALS 3D-PUNKTE
Müheloser Import von xyz-Dateien in unserem 4Archicad Plugin:
Der Import von xyz-Dateien aus Origins gelingt jetzt mühelos mit wenigen Klicks. Die gewünschten 3D-Punkte erscheinen so ganz einfach in Archicad.
Wie das genau funktioniert, zeigen wir im Video.
MESH AKTUALISIEREN
Mit der neuen „Update Mesh“ Funktion ist es ganz einfach weitere 3D-Punkte zu einem Mesh in Archicad hinzuzufügen und so die Vermaschung weiter zu verfeinern oder zu ergänzen.
Wie das genau funktioniert, zeigen wir im Video.
ALLGEMEINE VERBESSERUNGEN
Fix: Sonderzeichen in Namen und Pfaden
Fix: Viewport Synchronisation
Fix: Überschreiben der Grundrissdarstellungsauswahl für die Origins-Punktwolken
Kompatibilität mit Archicad Versionen 27, 28 und 29
Für seine Abschlussarbeit im Studiengang Bauingenieurwesen (Tiefbau) an der DHBW Mosbach setzte Maximus König auf einen modernen, kombinierten Workflow zur Bestandserfassung.
Das Projektziel war klar definiert – eine präzise, digital verwertbare Dokumentation einer bestehenden Stützwand entlang der Ortsdurchfahrt L172 im Ortsteil Hammereisenbach zu erstellen. Neben digitalen Plänen sollte auch ein physisches 3D-Modell entstehen, das als Anschauungsobjekt dient.
Der Ansatz: die Verbindung moderner Technologien wie terrestrischem Laserscanning, Drohnen-Photogrammetrie, Punktwolkenverarbeitung und 3D-Druck.
PROJEKTSTART: PLANUNG UND VORBEREITUNG
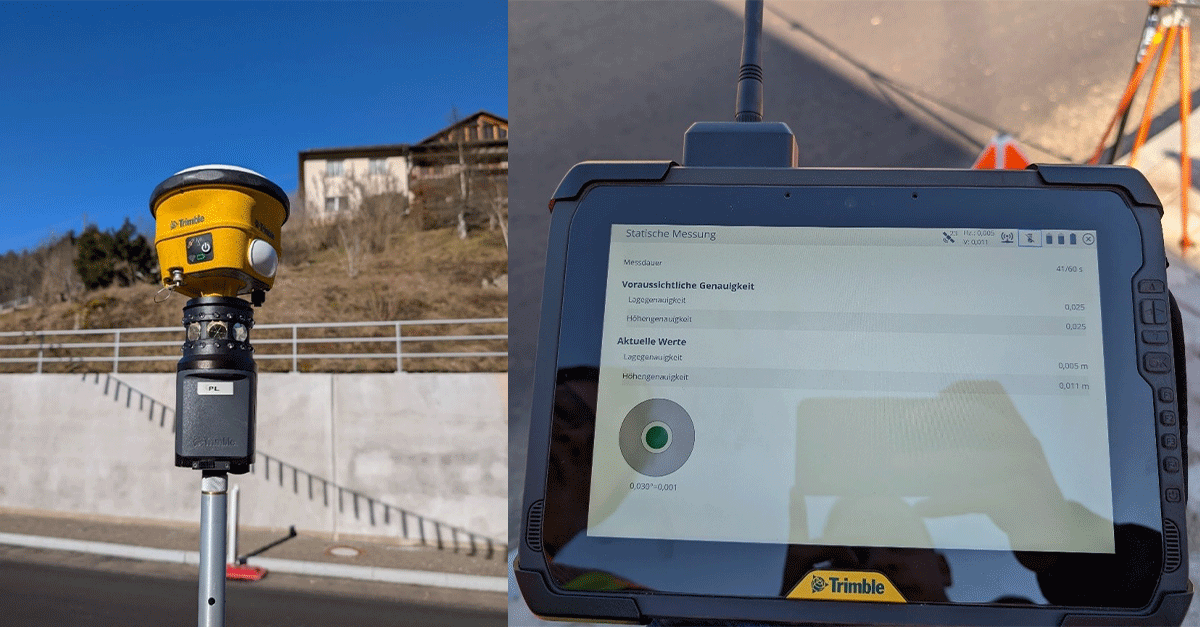
Bevor die eigentliche Datenerfassung beginnen konnte, legte Maximus ein Festpunktnetz an, das sowohl für die freie Stationierung des terrestrischen Laserscanners als auch für die georeferenzierte Auswertung der Drohnenbilder diente.
Damit waren die Grundlagen geschaffen, um die beiden Messtechnologien miteinander zu kombinieren und die daraus resultierenden Daten koordinatenscharf zusammenzuführen.
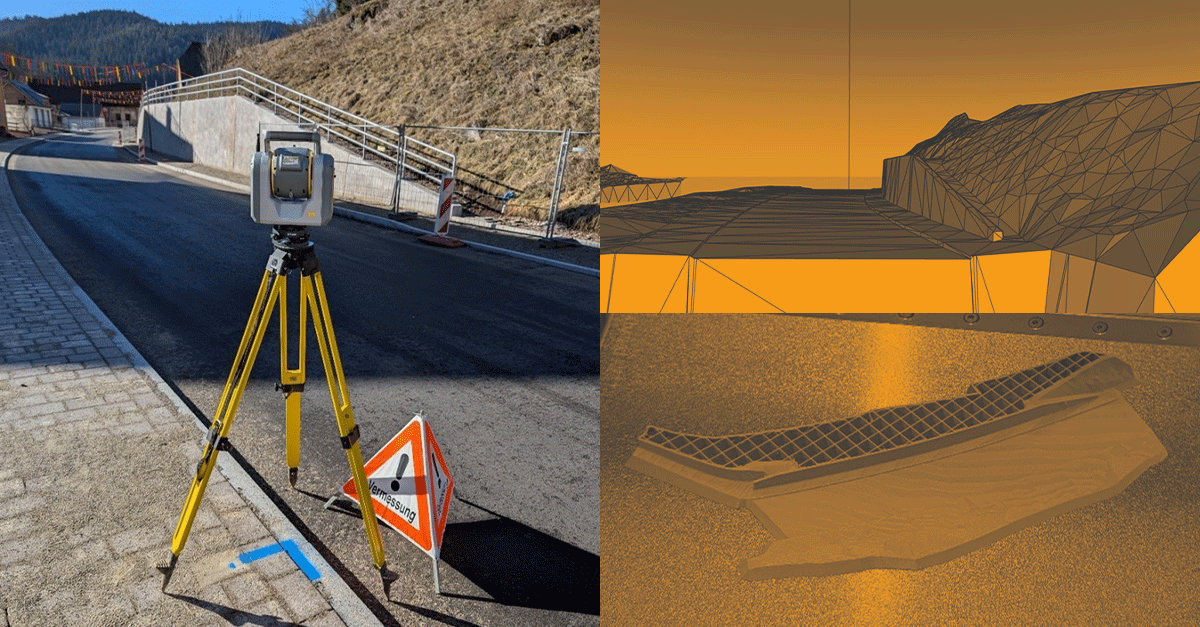
ZWEI METHODEN, EIN ZIEL: LASERSCANNING TRIFFT DROHNE
Die Vermessung erfolgte durch eine Kombination aus terrestrischem Laserscanning und einer photogrammetrischen Drohnenbefliegung:
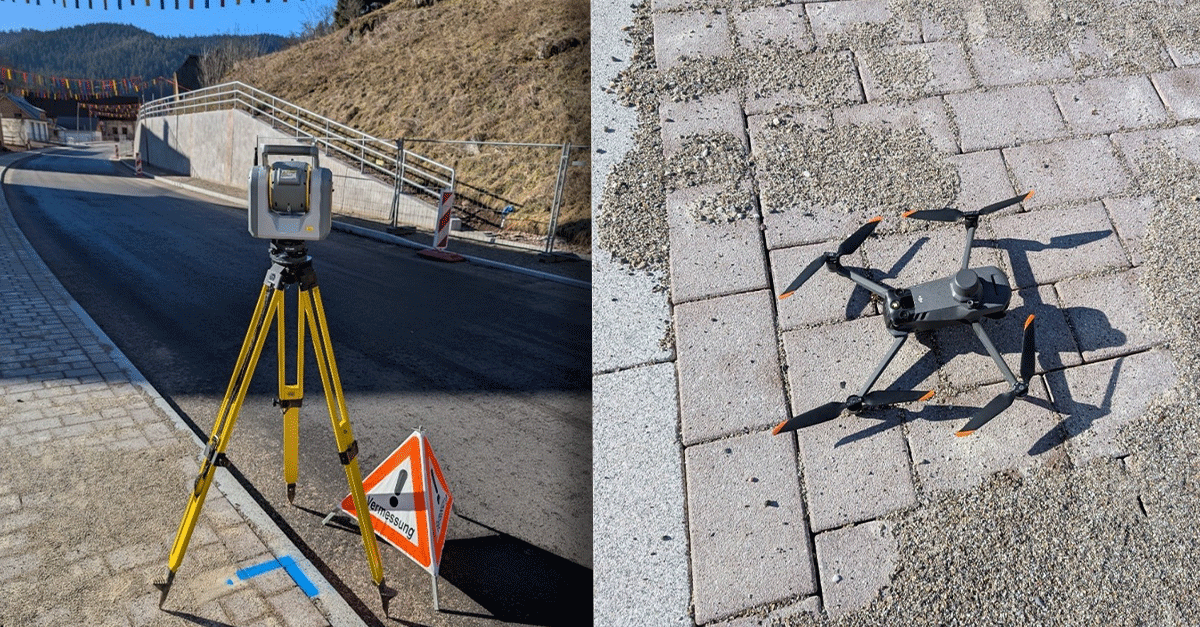
Der Trimble SX12, ein hochpräziser terrestrischer Laserscanner, lieferte detaillierte Punktwolkendaten des Stützwandbereichs und der Straßenumgebung.
Parallel dazu wurde mit der DJI Mavic 3 Enterprise eine Drohnenbefliegung durchgeführt, aus der über photogrammetrische Auswertung eine weitere Punktwolke generiert wurde.
Die Drohnenbefliegung dauerte nur etwa 20 Minuten, der terrestrische Scan – aufgrund mehrfacher Gerätestandorte – rund drei Stunden.
DATENFUSION UND VERARBEITUNG: VOM ROHDATENCHAOS ZUR PUNKTWOLKE
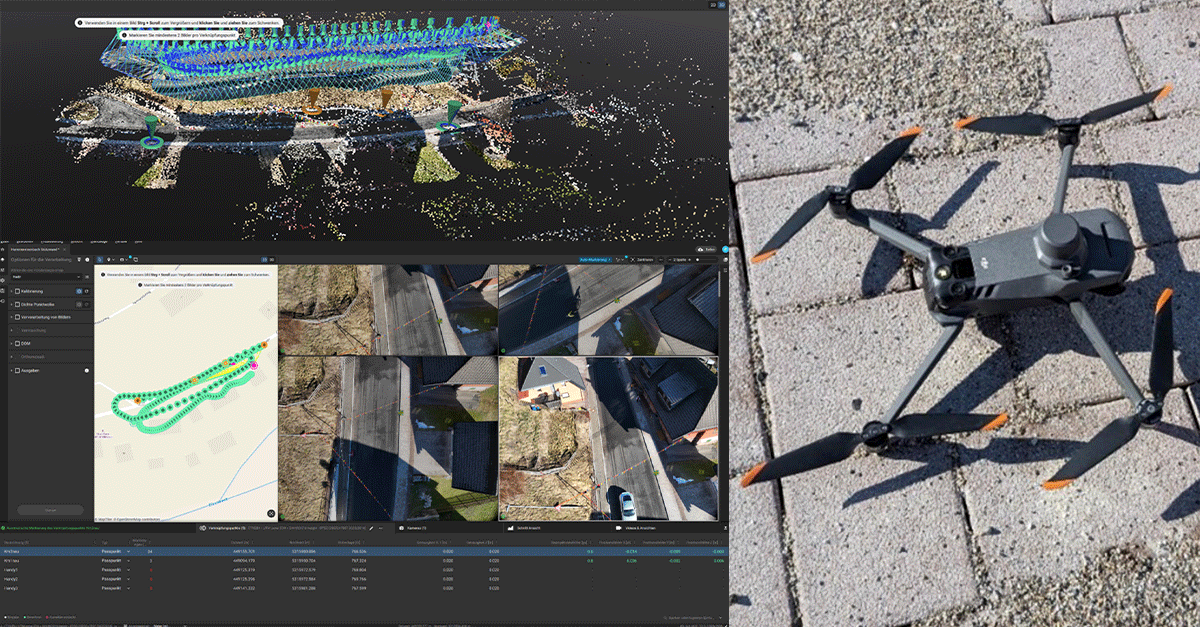
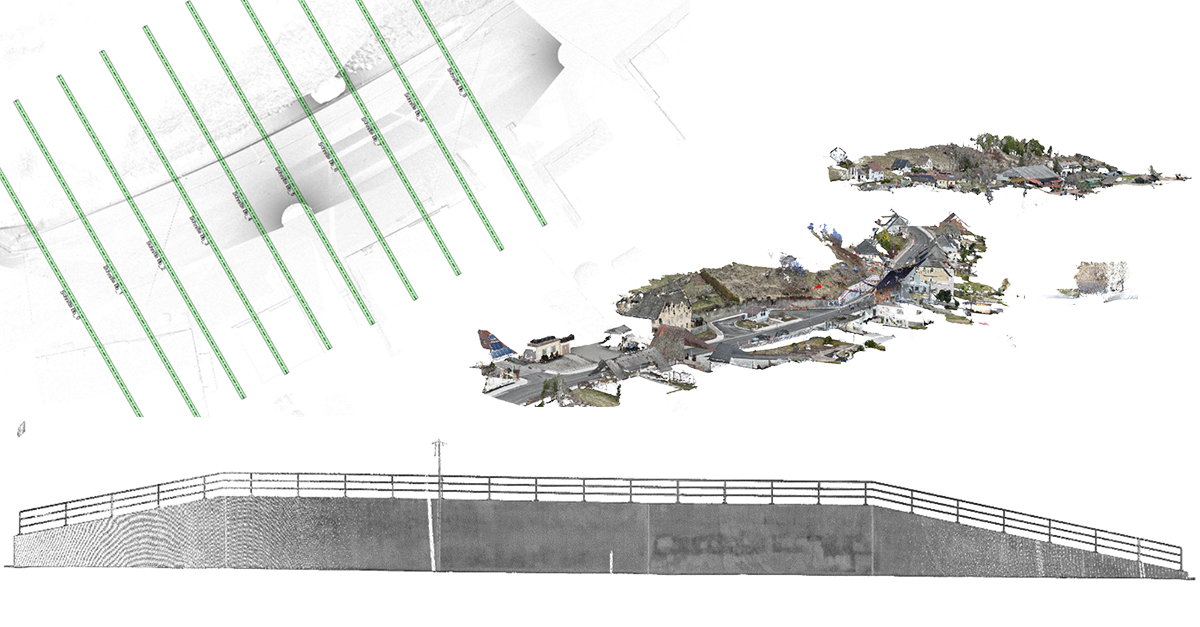
Nach Abschluss der Feldarbeiten wurden die erfassten Daten in PIX4Dmapper weiterverarbeitet, was ca. 1h dauerte. Hier erfolgte:
Die Georeferenzierung der Drohnenaufnahmen mithilfe der zuvor gesetzten Passpunkte,
die Erzeugung der Punktwolke aus den Orthofotos sowie
die Zusammenführung der Drohnen- und Laserscandaten in einer gemeinsamen, präzisen Punktwolke.
Diese fusionierte Punktwolke diente anschließend als Ausgangsbasis für alle weiteren Arbeitsschritte.
ANALYSE UND PROFILERSTELLUNG MIT POINTCAB ORIGINS
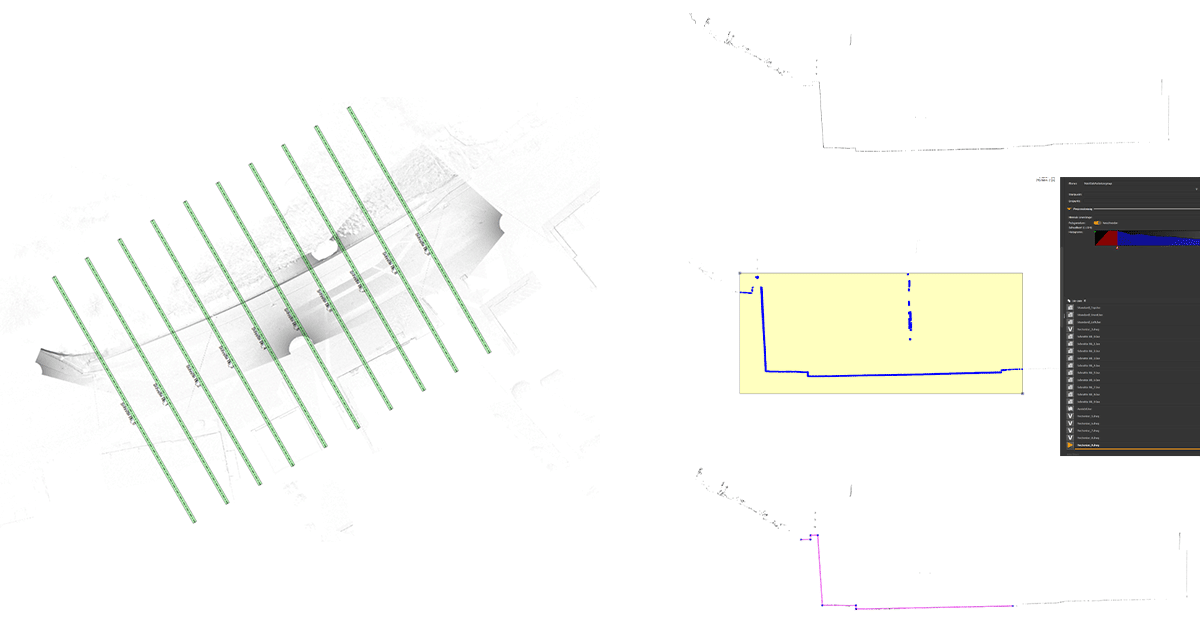
Die zusammengeführte Punktwolke wurde in PointCab Origins importiert, wo Maximus zunächst eine Draufsicht erstellte und daraus Schnitte und Querprofile generierte.
Besonders hilfreich waren die integrierten Vektorisierungsfunktionen: Sie ermöglichten die schnelle Erzeugung von Linienzügen, die direkt als DXF-Dateien exportiert werden konnten. Diese DXF-Dateien wurden anschließend in anderen CAD-Programmen weiterverwendet – etwa zur Erstellung von Planunterlagen oder zur Modellierung eines digitalen Geländemodells.
Die Bearbeitung in PointCab Origins dauerte insgesamt etwa vier Stunden. Besonders geschätzt wurden die Effizienz und Präzision bei der Profilerstellung.
VOM QUERPROFIL ZUM PHYSISCHEN MODELL: WEITERVERARBEITUNG DES DGM
Previous
Next
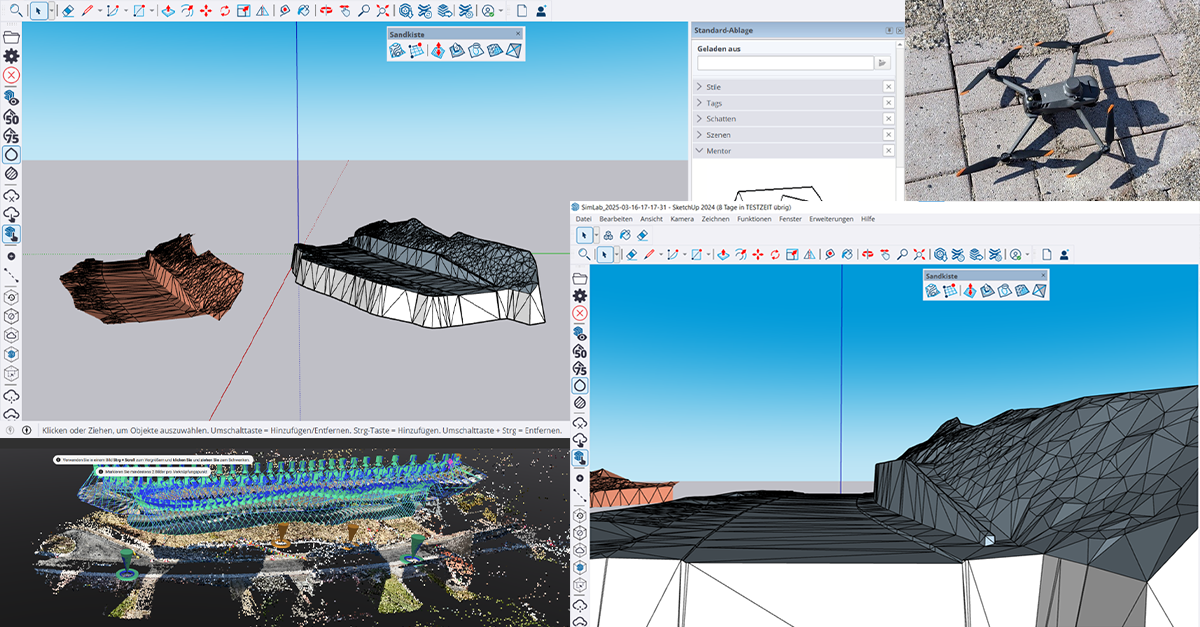
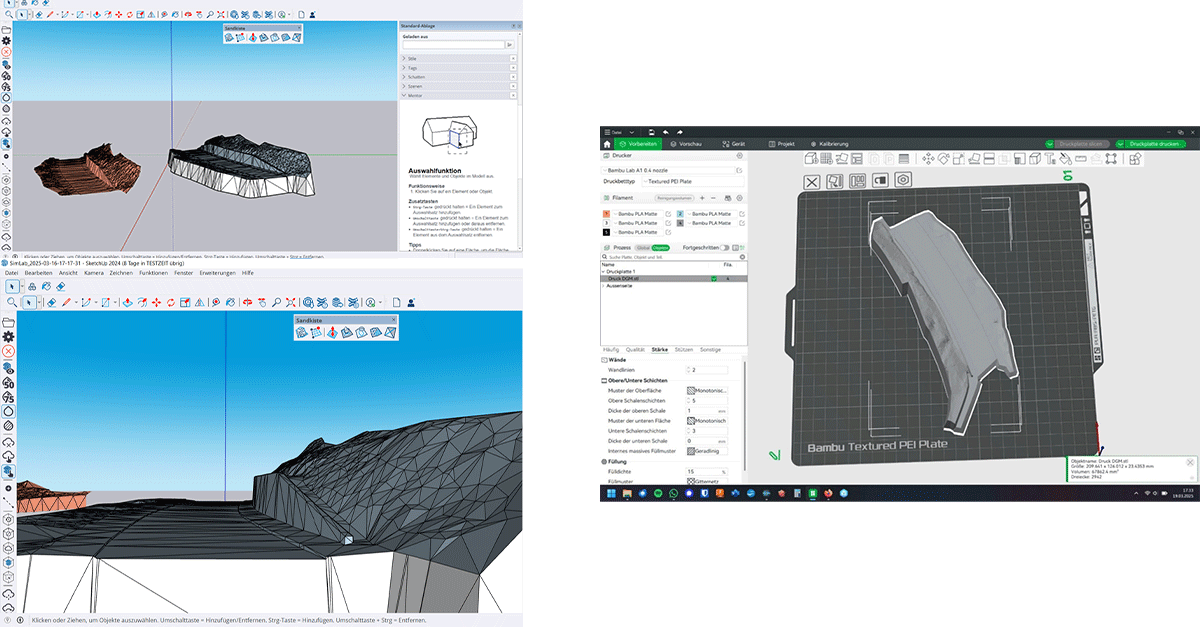
Im nächsten Schritt wurden die exportierten DXF-Profile in RIB Civilimportiert, wo Maximus daraus ein digitales Geländemodell (DGM) des erfassten Bereichs erstellte. Dieses Modell wurde anschließend in SketchUp überführt und zu einem geschlossenen Volumenkörper weiterentwickelt.
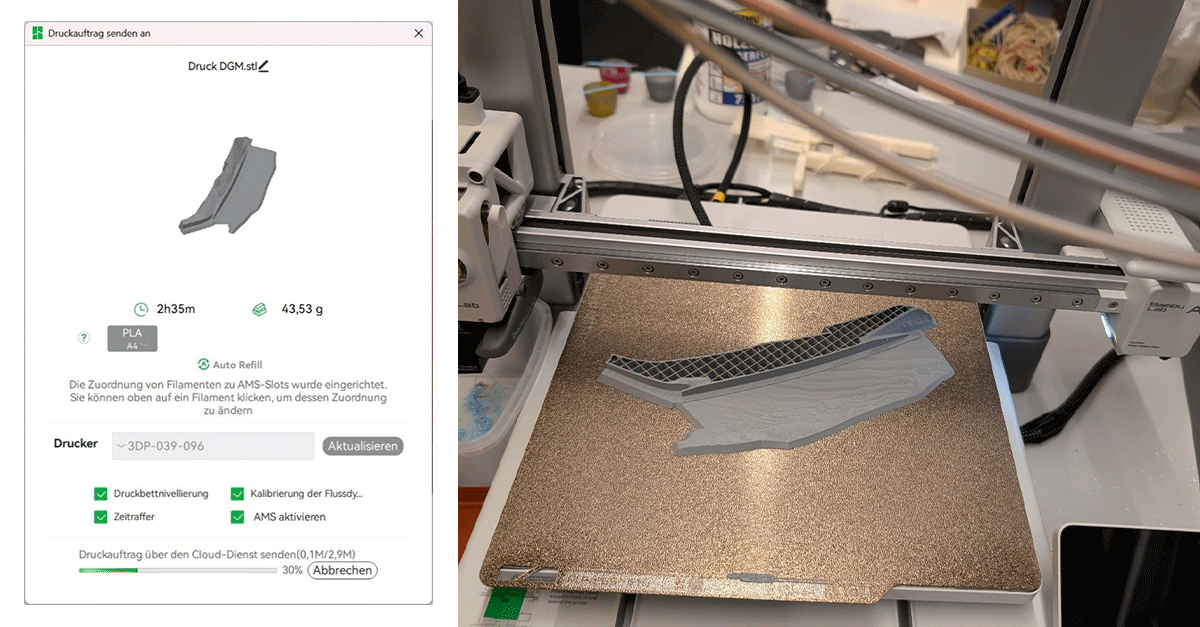
Die endgültige Aufbereitung des 3D-Modells für den Druck erfolgte in Bambu Studio, wo es in das benötigte STL-Format überführt wurde. Der 3D-Druck selbst war der krönende Abschluss – ein greifbares Modell des Straßenabschnitts, das sich ideal zur Präsentation und Diskussion mit Planungsbeteiligten eignet.
ZUSÄTZLICHE AUSWERTUNG: VIRTUELLER RUNDGANG UND PLANZEICHNUNGEN
Previous
Next
In Trimble Business Center erstellte Maximus eine virtuelle Kamerafahrt durch die Punktwolke, was ca. 1h dauerte. Diese Art der Visualisierung bietet einen intuitiven Einblick in das Bauwerk und kann z. B. im Rahmen von Bürgerbeteiligung oder Planungsworkshops eingesetzt werden.
Wer hingegen auf eine einfache und ortsunabhängige Punktwolken-Visualisierung setzen möchte, kann alternativ auf PointCab Nebula zurückgreifen. Zwar lassen sich damit keine Kamerafahrten generieren, doch bietet die Cloud-Plattform eine niedrigschwellige Möglichkeit, große Punktwolkendaten ohne spezielle Software direkt im Browser zu betrachten und zu teilen – ideal z. B. für Projektteams oder Auftraggeber.
Darüber hinaus wurden die in PointCab erzeugten Schnitte in AutoCAD eingelesen, um daraus klassische Planzeichnungen für die Dokumentation im Bauwerksbuch abzuleiten. Dieser Schritt nahm rund sechs Stunden in Anspruch, lieferte aber ein professionelles Ergebnis, das mit herkömmlichen CAD-Plänen problemlos mithalten kann.
FAZIT: KLARE PLANUNG, EFFIZIENTER ABLAUF
Mit seinem Projekt zeigt Maximus König eindrucksvoll, wie sich moderne Messverfahren und Softwaretools sinnvoll miteinander verbinden lassen – von der Datenerfassung über die Auswertung bis zur Visualisierung. Der Schlüssel zum Erfolg lag in der guten Planung des Workflows und dem gezielten Einsatz spezialisierter Software für jeden Arbeitsschritt.
Maximus König blickt zurück:
„Zum Projektbeginn einen Plan und Überblick erstellen, welche Software für welchen Schritt und welches Ziel benötigt wird – das spart enorm viel Zeit.“
Sein Projekt beweist: Mit einem durchdachten Workflow und den richtigen Werkzeugen lassen sich selbst komplexe Infrastrukturbauwerke effizient und präzise digital erfassen und darüber hinaus anschaulich visualisieren.
Projektbeteiligte
Das Projekt wurde von Maximus König im Rahmen seiner Abschlussarbeit „Innovative Straßenvermessung mit dem 3D-Laserscanner“ durchgeführt.
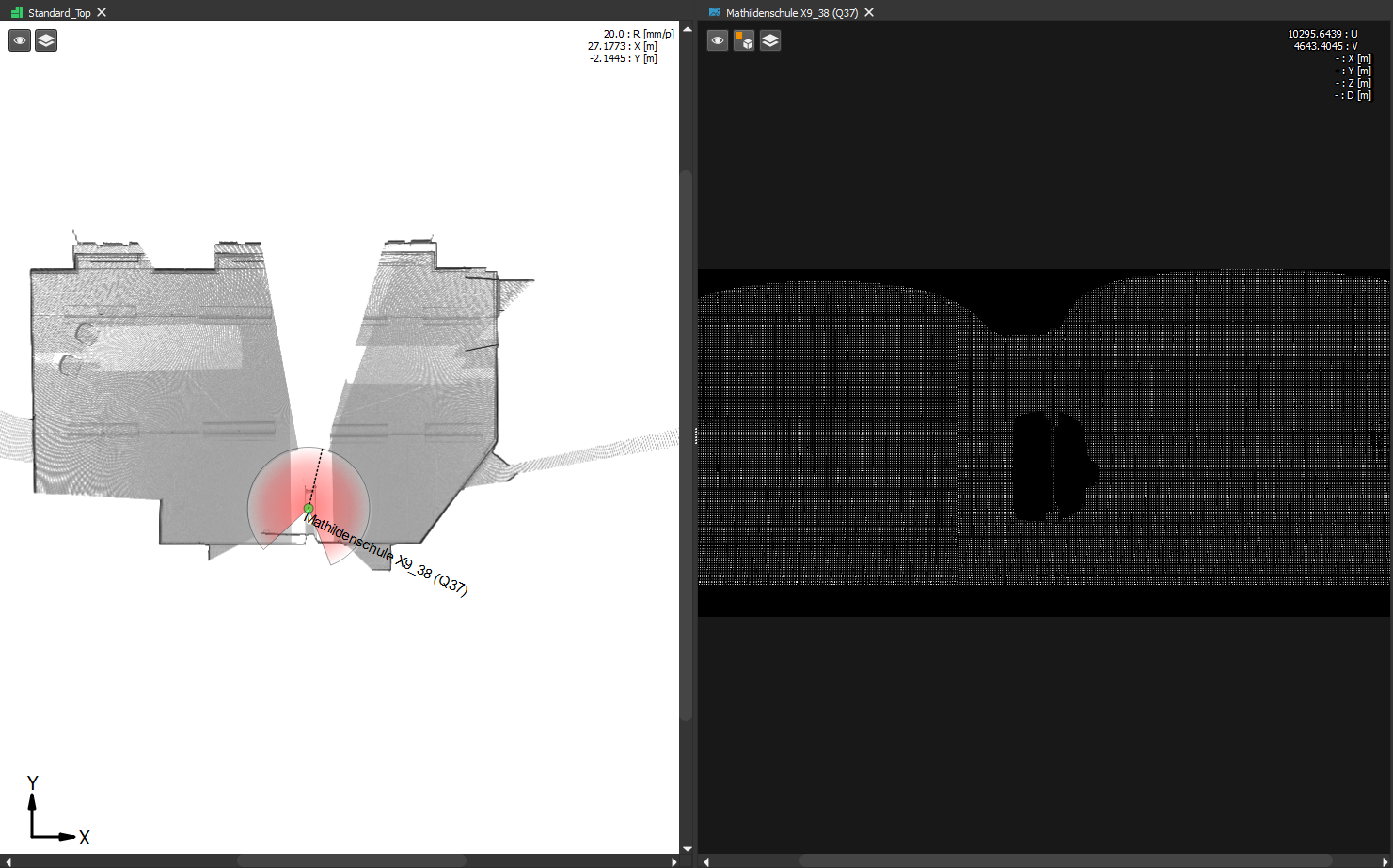
Schwierigkeiten oder merkwürdige Ergebnisse beim Import von Punktwolken aus einem Trimble X9 Laserscanner? Keine Sorge, wir lösen das mit einer kleinen Einstellung.
Leere Ergebnisse bei X9 Punktwolken in Origins?
Was ist der Auslöser des Problems?
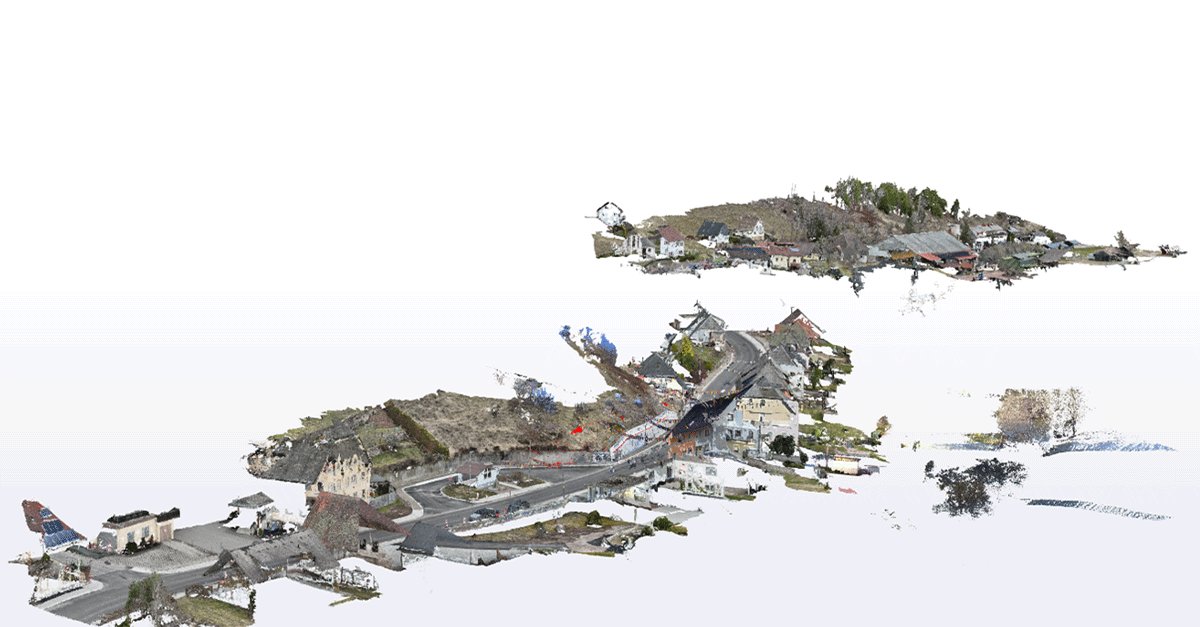
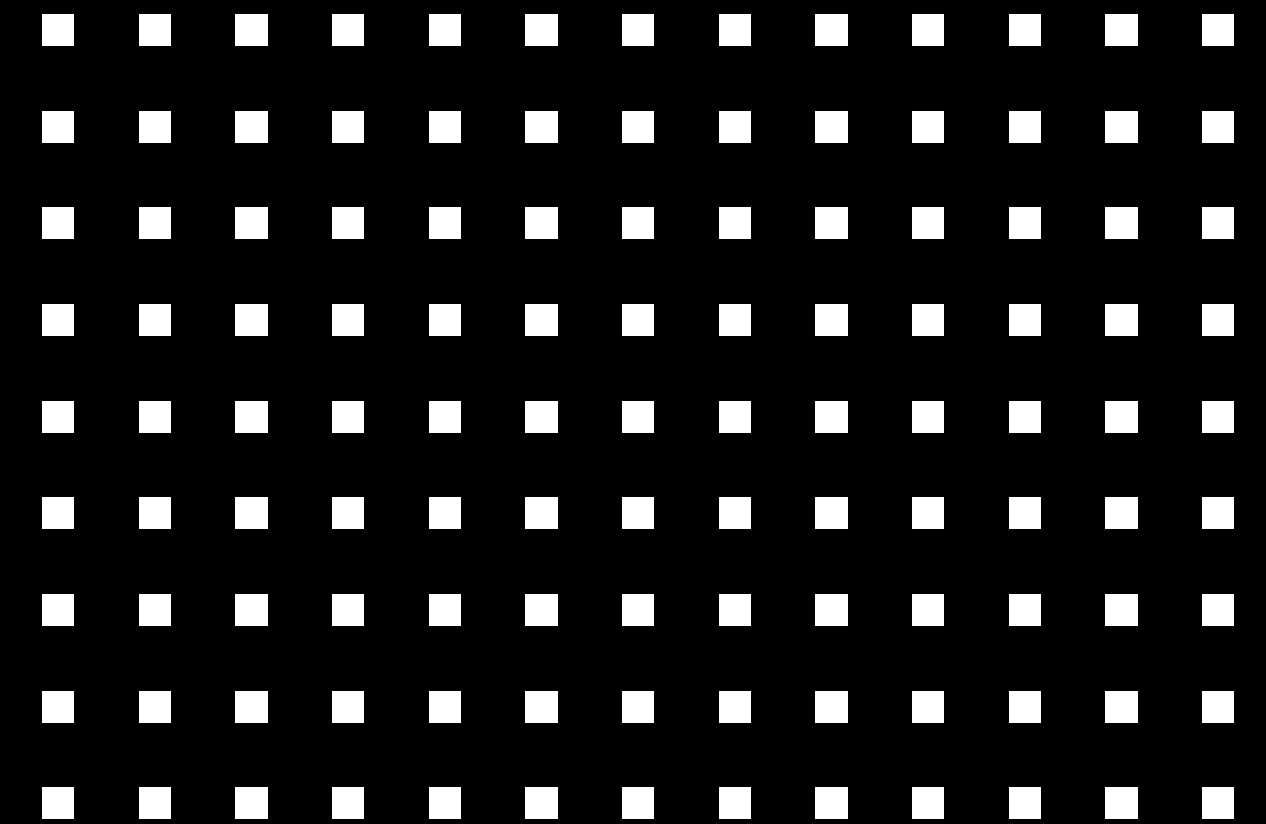
Trimble-Scans enthalten leere Zeilen und Spalten, wodurch ein „Schachbrettmuster“ in den Daten entsteht.
Dies kann dazu führen, dass Punkte aufgrund des Nachbarschaftsfilters herausgefiltert werden, der Punkte entfernt, die zu weit voneinander entfernt sind.
Keine Sorge, wir beheben das zusammen!
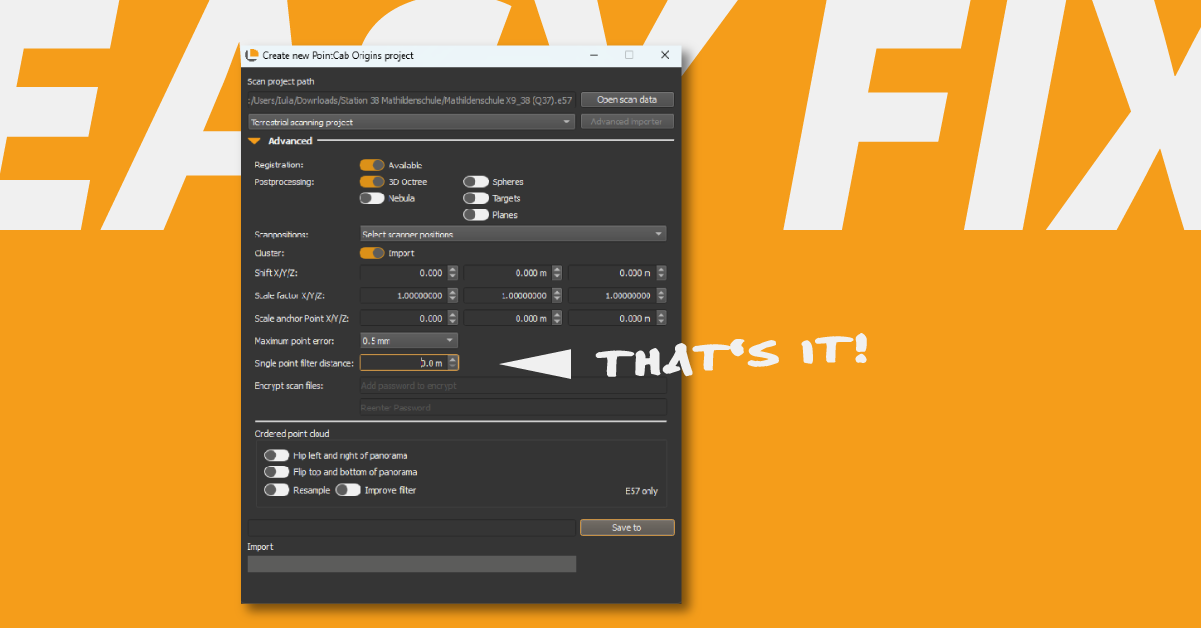
Einfache Lösung: Anpassen der Import-Einstellungen
Was muss verändert werden?
Die gewünschten e57 Scans auswählen.
Unter „Erweitert„ → bei „Single point filter distance“ den Wert auf 0.0setzen.
Das Resultat:
Problem gelöst!
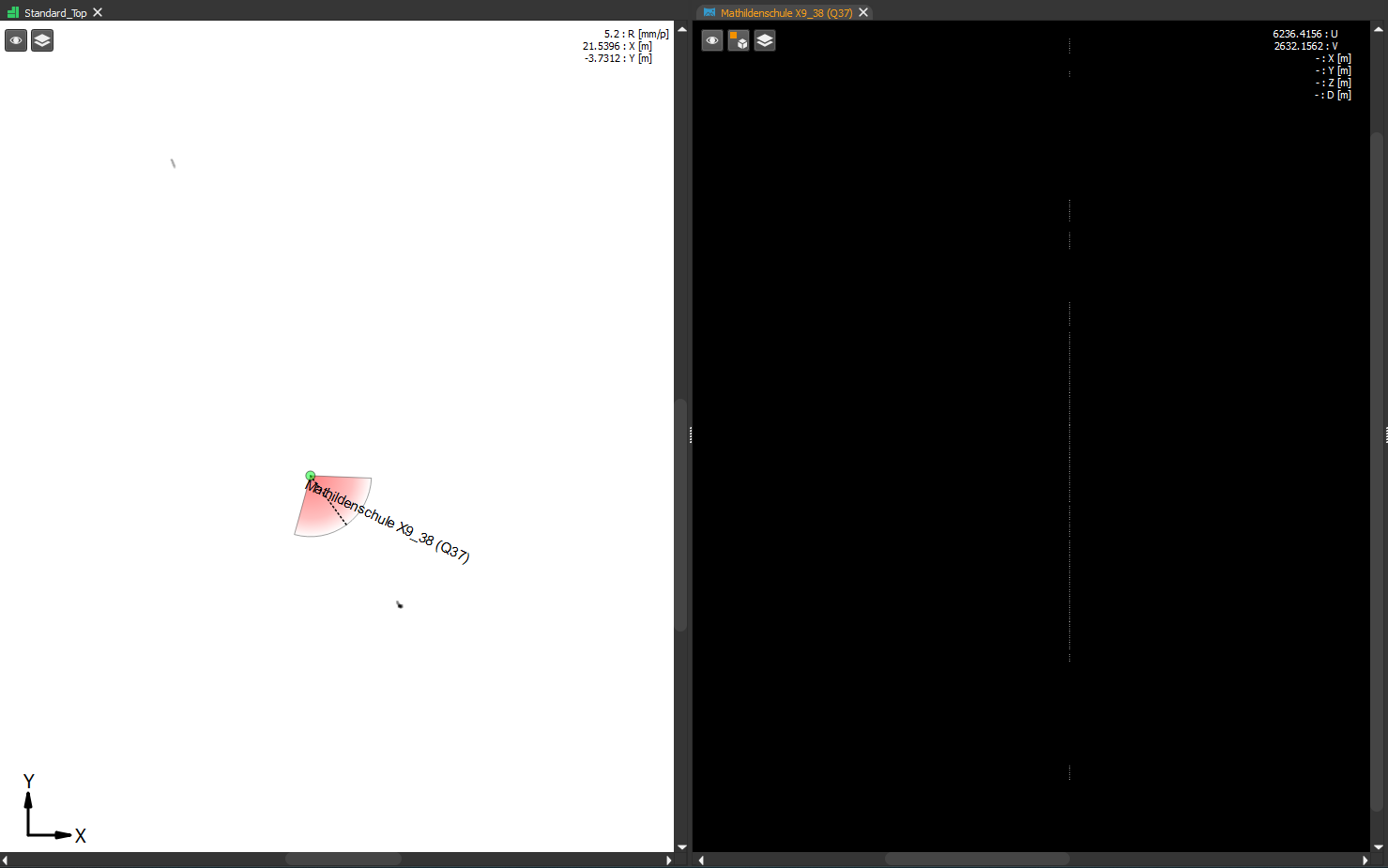
Mit den veränderten Einstellungen, werden die Punktwolkendaten aus dem Trimble X9 nun korrekt dargestellt.
In der Standard-Top-Ansicht wie auch im Panorama wird nun alles korrekt dargestellt.
Sie wollen immer auf dem neusten stand bleiben?
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!
Woher kommt Laser Scanning? Wer hat es erfunden? Wie wurde Laser Scanning in den vergangenen Jahrzehnten bis zum heutigen Tag eingesetzt?
Unsere Reihe „The origins of laser scanning“ geht diesen Fragen auf den Grund und liefert Antworten zu dieser spannenden Technologie, die inzwischen kaum noch aus unserem Alltag wegzudenken ist.
Technologische Reife ab 2005
Ab Mitte der 2000er kommen Scanner mit integrierten Kompensatoren auf den Markt. Diese gleichen Neigungen automatisch aus und erhöhen die Messgenauigkeit deutlich. Vorreiter sind Hersteller wie Leica Geosystems und Trimble.
Vom Spezialgerät zum Standardwerkzeug
Heute ist 3D-Laserscanning fester Bestandteil im Bauwesen, in der Industrie und in der Denkmalpflege. Mit stationären, mobilen oder Drohnen-basierten Systemen lassen sich Gebäude, Anlagen und ganze Städte dreidimensional erfassen.
BIM und digitale Workflows
Die erfassten Punktwolken fließen direkt in CAD- und BIM-Systeme ein. Häufig übernehmen KI-gestützte Verfahren die automatische Modellgenerierung und Analyse. Das spart Zeit und reduziert Fehler.
BIM – Building Information Modeling
BIM ist eine Arbeitsmethode, bei der alle relevanten Gebäudedaten digital erfasst, kombiniert und vernetzt werden. Laserscanning liefert die präzisen Geometriedaten, die als Grundlage für die digitale Planung dienen.
Vielfältige Anwendungen
Architektur & Bestandserfassung
Reverse Engineering & Qualitätssicherung
Umwelt- und Klimaforschung (z. B. Gletscherbeobachtung, Küstenveränderungen)
Sicherheits- und Überwachungstechnik
Verkehrs- und Stadtplanung
Software als Schlüssel
Rohdaten allein bringen keinen Mehrwert – erst mit spezialisierter Software wie PointCab Origins lassen sich aus Millionen Punkten verständliche, verwertbare Ergebnisse erzeugen. Die Software ist kompatibel mit allen gängigen CAD- und BIM-Systemen und übersetzt komplexe Daten in greifbare Informationen.
Wussten Sie, dass…?
… moderne LiDAR-Systeme heute bis zu 2 Millionen Messpunkte pro Sekunde erfassen – und dabei Details wie einzelne Blätter an einem Baum oder Kabel in einer Industrieanlage erkennen können?
Das war der letzte Teil dieser Reihe
Neugierig auf mehr? Wir veröffentlichen regelmäßig Artikel in unserem Blog. Dranbleiben lohnt sich.
Sie wollen immer auf dem neusten stand bleiben?
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!
Woher kommt Laser Scanning? Wer hat es erfunden? Wie wurde Laser Scanning in den vergangenen Jahrzehnten bis zum heutigen Tag eingesetzt?
Unsere Reihe „The origins of laser scanning“ geht diesen Fragen auf den Grund und liefert Antworten zu dieser spannenden Technologie, die inzwischen kaum noch aus unserem Alltag wegzudenken ist.
Von der Forschung in die Anwendung
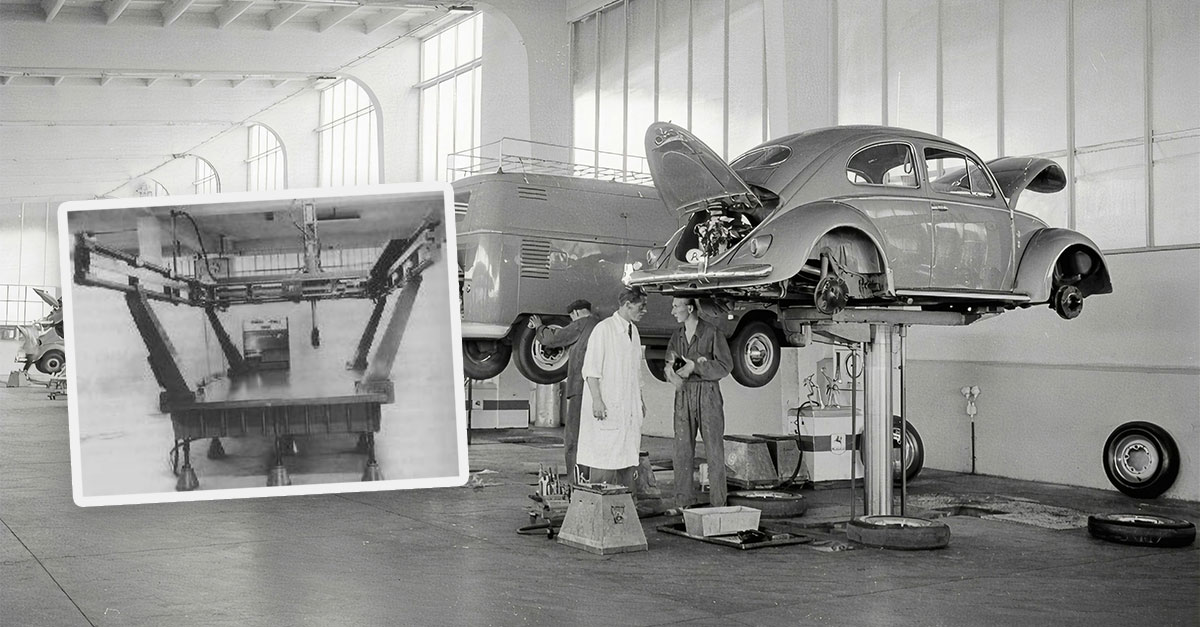
Parallel zur militärischen und wissenschaftlichen Nutzung entstehen in den 1970ern erste industrielle Systeme. Die italienische Firma DEA entwickelte beispielsweise ein 3-Achsen-Koordinatenmessgerät, das neue Standards bei der physischen Objektvermessung setzt.
1972 nutzen Studierende der Universität Utah diese Technologie, um mithilfe eines Algorithmus erstmals ein Auto – einen VW Käfer – digital zu vermessen.
Punktwolke – das digitale Abbild der Realität
Eine Punktwolke ist eine Sammlung von Millionen einzelner Messpunkte im Raum. Jeder Punkt hat eine genaue Position (x, y, z) und oft zusätzliche Informationen wie Farbe oder Intensität. Zusammen ergeben sie ein präzises 3D-Modell der erfassten Szene.
Neue Anwendungsfelder in den 1980ern
1984 wird der erste streifenbasierte Laserscanner entwickelt, um ein 3D-Bild des menschlichen Kopfes zu erstellen. Diese Technik dient vor allem der Animation und ist ein Vorläufer moderner 3D-Scanning-Verfahren in Film, Medizin und Gaming.
Die 1990er: Der Markt öffnet sich
1992 bringt Trimble (damals Mensi) die S-Serie auf den Markt – 3D-Laserscanner für industrielle Anwendungen. 1993 folgen die ersten kommerziell frei nutzbaren Scanner.
Der tragbare Durchbruch
1996 entwickelt Cyra Technologies den Cyrax, den ersten tragbaren 3D-Laserscanner speziell für Architekten, Ingenieure und Geodäten. Wenige Jahre später übernimmt Leica Geosystems das Unternehmen und etabliert sich als einer der führenden Hersteller.
Wussten Sie, dass…?
… der erste tragbare 3D-Laserscanner (Cyrax, 1996) so groß wie ein Reisekoffer war – und trotzdem in vielen Vermessungsprojekten ganze Teams ersetzte?
So geht's weiter:
Im nächsten Teil unserer Serie geht es um 3D-Laserscanning als Alltagswerkzeug in der digitalen Welt der 2000er bis heute.
Sie wollen immer auf dem neusten stand bleiben?
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!
Woher kommt Laser Scanning? Wer hat es erfunden? Wie wurde Laser Scanning in den vergangenen Jahrzehnten bis zum heutigen Tag eingesetzt?
Unsere Reihe „The origins of laser scanning“ geht diesen Fragen auf den Grund und liefert Antworten zu dieser spannenden Technologie, die inzwischen kaum noch aus unserem Alltag wegzudenken ist.
Ein Laser, ein Flug zum Mond – und der Start einer Revolution in der Vermessungstechnik
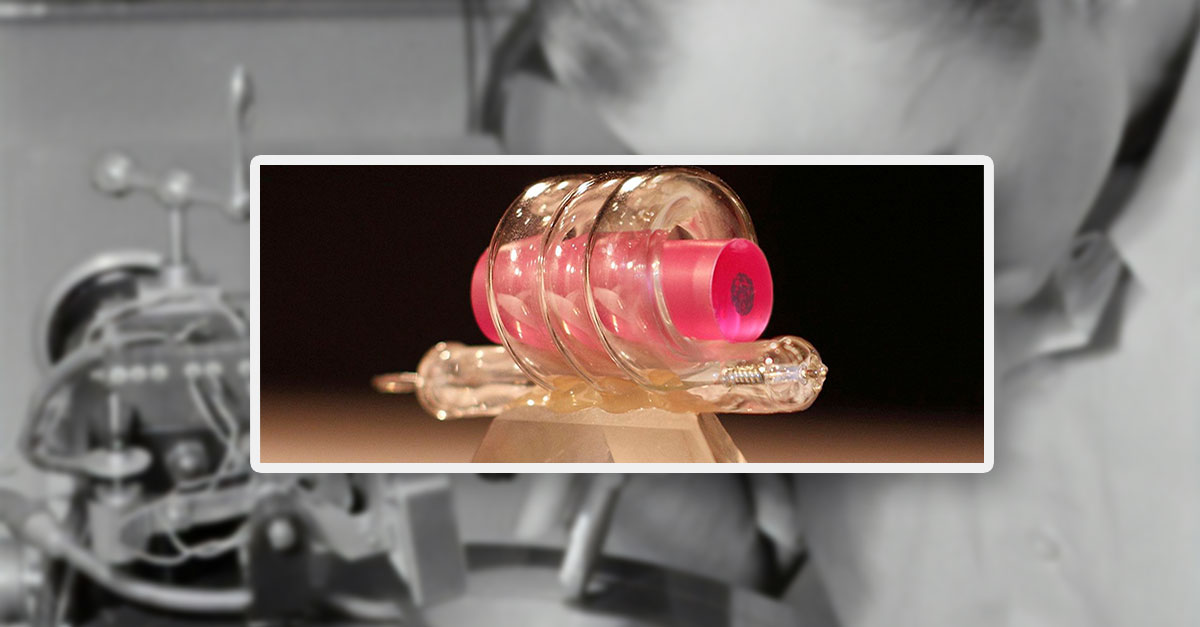
1960 entwickelt der US-Physiker Theodore Maiman bei den Hughes Research Laboratories den ersten funktionierenden Laser. Er basiert auf einem Rubin-Kristall und markiert den Startpunkt für eine neue Ära der Mess- und Sensortechnik.
Theodore Maiman erfand den Laser, weil er das Prinzip des Masers auf Licht statt Mikrowellen übertragen wollte. Trotz anfänglicher Ablehnung durch seine Vorgesetzten setzte er die Forschung unter Androhung seiner Kündigung aus eigenem Antrieb fort. Praktische Anwendungen waren zunächst unklar – Maiman selbst nannte den Laser „eine Lösung, die ein Problem sucht“.
Am 16. Mai 1960 bauten Theodore Maiman und Charles Asawa somit den ersten funktionierenden Rubinlaser. Trotz der anfänglichen Ablehnung erhielt Maiman ein begrenztes Budget und veröffentlichte seine Ergebnisse im August 1960 in der Fachzeitschrift Nature. Die Erfindung verbreitete sich schnell, doch sein Arbeitgeber blieb skeptisch. 1962 gründete Maiman daher die Korad Corporation; das US-Patent folgte 1967.
Fun Fact:
Der „Vater des Lasers“ Theodore Maiman erhielt nie den Nobelpreis – doch im Jahr 2000 nutzte man seine eigene Erfindung, um ihn in München per Laser zu operieren.
Schon ein Jahr nach Maimans Entwicklung des Lasers baute die Hughes Aircraft Company den ersten LiDAR-Prototypen (Light Detection and Ranging). Das Prinzip: Kurze Laserpulse werden ausgesendet, treffen auf ein Ziel und reflektieren zurück. Aus der Zeit, die das Licht für Hin- und Rückweg benötigt, lässt sich die Entfernung berechnen.
Was ist LiDAR?
LiDAR steht für Light Detection and Ranging. Dabei sendet ein Gerät Laserimpulse aus und misst die Zeit, bis das Licht vom Ziel reflektiert wird. So lassen sich Entfernungen und Strukturen präzise bestimmen – oft mit einer Genauigkeit im Millimeterbereich.
Militärische Anfänge
Bereits in den 1950er-Jahren experimentiert das US-Militär mit optischen Messgeräten – eine frühe Vorstufe heutiger LiDAR-Systeme. In den 1960er-Jahren dient LiDAR zunächst der militärischen Geländekartierung und Aufklärung.
Apollo 15 – LiDAR im All
1971 erlebt LiDAR seinen internationalen Durchbruch: Die NASA nutzt die Technologie auf der Apollo-15-Mission, um die Oberfläche des Mondes zu kartieren. Mit einem flashlamp-gepumpten Rubinlaser werden tausende Messungen der Mondtopographie aus der Umlaufbahn durchgeführt.
Langsame Entwicklung bis in die 1980er
Der Einsatz in der Luft- und Raumfahrt wächst in den 1970ern, etwa zur topografischen Kartierung von Landschaften, Eisflächen, Ozeanen und Atmosphäre. Erst mit der Verfügbarkeit von kommerziellen GPS-Systemen und verbesserter Satellitenkommunikation in den 1980er-Jahren wird LiDAR für präzisere und effizientere Messungen aus der Luft praxistauglich.
Wussten Sie, dass…?
… die Apollo-15-Mission 1971 LiDAR nutzte, um die Mondoberfläche aus der Umlaufbahn zu vermessen? Damit war LiDAR das erste Laser-Messverfahren im Weltraum.
So geht's weiter:
Im nächsten Teil unserer Serie geht es um den Übergang von der Forschung zum praktischen Einsatz der LiDAR Technologien in den Jahrzehnten bis Ende der 90er Jahre.
Sie wollen immer auf dem neusten stand bleiben?
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!
Mit dem Ableben unseres geschätzten CEOs und Mitbegründers Dr. Richard Steffen hat PointCab nicht nur einen außergewöhnlichen Visionär, sondern auch einen guten Freund verloren.
Doch selbst in dieser schweren Zeit hat Richard vorgesorgt, damit das Unternehmen, das er mit so viel Leidenschaft aufgebaut hat, auch in Zukunft erfolgreich bleibt.
Es war sein ausdrücklicher Wunsch, dass Eric Bergholz die Rolle des CEO übernimmt und PointCab in die Zukunft führt.
Eric ist seit vielen Jahren eng mit PointCab verbunden. Als Geschäftsführer von Laserscanning Europe, unserer Schwesterfirma, war er direkt an der Entstehung der ersten Version der PointCab Software beteiligt. Außerdem bringt er eine langjährige Erfahrung und ein tiefes Verständniss für den Laserscanning-Markt mit.
Er hat unseren Weg von Anfang an begleitet, das Wachstum unseres Teams miterlebt und gemeinsam mit Richard Strategien und Innovationen vorangetrieben.
Mehr als ein Geschäftspartner war er einer von Richards besten Freunden – und jemand, dem Richard zutiefst vertraute, sein Lebenswerk weiterzuführen.
Eric kennt unsere Wurzeln, teilt unsere Werte und versteht unsere Mission.
Gemeinsam mit unserem Führungsteam – Chris (COO), Martin (CTO) und Nicole (CMO) – wird er sicherstellen, dass PointCab seinen Kurs der Innovation, Zuverlässigkeit und Kundennähe konsequent fortsetzt.
In den vergangenen Jahren hat Richard Schritt für Schritt Verantwortung an dieses Team übergeben und so eine reibungslose Übergabe vorbereitet.
Dass diese Struktur trägt, hat sich längst gezeigt: Projekte wurden erfolgreich umgesetzt, unsere Software kontinuierlich weiterentwickelt und Partnerschaften nachhaltig gestärkt.
Mit Eric als neuem CEO bauen wir auf diese Kontinuität und zugleich auf seine besondere Perspektive als jemand, der unsere Reise von Beginn an begleitet hat.
Eric kennt unsere Wurzeln, teilt unsere Werte und versteht unsere Mission.
Gemeinsam mit unserem Führungsteam – Chris (COO), Martin (CTO) und Nicole (CMO) – wird er sicherstellen, dass PointCab seinen Kurs der Innovation, Zuverlässigkeit und Kundennähe konsequent fortsetzt.
In den vergangenen Jahren hat Richard Schritt für Schritt Verantwortung an dieses Team übergeben und so eine reibungslose Übergabe vorbereitet.
Dass diese Struktur trägt, hat sich längst gezeigt: Projekte wurden erfolgreich umgesetzt, unsere Software kontinuierlich weiterentwickelt und Partnerschaften nachhaltig gestärkt.
Mit Eric als neuem CEO bauen wir auf diese Kontinuität und zugleich auf seine besondere Perspektive als jemand, der unsere Reise von Beginn an begleitet hat.
Darum blicken wir voller Zuversicht in die Zukunft: PointCab steht auf einem starken Fundament – mit klarer Strategie, einem eingespielten Führungsteam und einem CEO, der das Unternehmen in- und auswendig kennt.
Zu Beginn dieses neuen Kapitels heißen wir Eric herzlich in unserem Team als neuen CEO willkommen.
Wir sind überzeugt, dass PointCab unter seiner Führung weiterhin wegweisende Lösungen entwickeln, seine internationale Präsenz ausbauen und der verlässliche Partner bleiben wird, den Sie kennen.
Sie wollen immer auf dem neusten stand bleiben?
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!






































{kind=link}
{kind=link}
{kind=link}