THE AEC IMPACT
WELTBEVÖLKERUNGSTAG

Die AEC (Architecture, Engineering, & Construction) Brache ist der Treiber unserer baulichen Umwelt. In der Artikelreihe “The AEC Impact” befassen wir uns mit den vielfältigen Arten, auf welche diese Branche dazu beiträgt unsere Gesellschaft, unser Zusammenleben, unsere Umwelt und unseren Wohlstand zu verbessern.
WELTBEVÖLKERUNGSTAG - hintergrund
Der Weltbevölkerungstag wird am 11. Juli begangen und soll auf die dringenden Probleme im Zusammenhang mit der wachsenden Weltbevölkerung aufmerksam machen. 1989 von den Vereinten Nationen ins Leben gerufen, betont der Tag die Bedeutung von Bevölkerungsschwankungen und deren Auswirkungen auf Entwicklung, Umwelt und globale Gesundheit. Da die Weltbevölkerung weiter wächst und derzeit über 7,9 Milliarden Menschen zählt, werden die Herausforderungen im Zusammenhang mit Nachhaltigkeit, Stadtplanung und Ressourcenmanagement immer drängender. Vermesser, Ingeniere und Architekten spielen eine entscheidende Rolle bei der Bewältigung dieser Probleme, indem sie fortschrittliche Technologien wie Laserscanning und Digital Twins nutzen, um nachhaltige und effiziente Lösungen zu entwickeln.

WELTBEVÖLKERUNGSTAG - ziele
Der Weltbevölkerungstag soll auf die dringenden Probleme aufmerksam machen, die sich aus dem Bevölkerungswachstum ergeben, darunter unter anderem:
- Nachhaltige Entwicklung: Der Versuch wirtschaftlichen und sozialen Fortschritt zu ermöglichen und gleichzeitig die Ressourcen für zukünftige Generationen zu bewahren.
- Urbanisierung: Bessere Steuerung der schnellen Ausdehnung von Städten, um Wohnraum angemessen bereitzustellen und grundlegende Dienstleistungen zu gewährleisten.
- Gesundheitsversorgung: Bewältigung der Bedürfnisse wachsender Bevölkerungen, insbesondere in Entwicklungsländern, um den Zugang zur Gesundheitsversorgung sicherzustellen und Krankheiten zu bekämpfen.
- Umweltauswirkungen: Minderung der negativen Auswirkungen menschlicher Aktivitäten auf die Umwelt, Förderung des Naturschutzes und Bekämpfung des Klimawandels.
- Ressourcenverteilung: Ressourcen wie Wasser, Nahrung und Energie sollen gerecht und nachhaltig verteilt werden.
Wie die AEC-Branche mithilfe von Laserscanning Ihren Beitrag leistet
Vermesser, Ingenieure und Architekten stehen an vorderster Front bei der Bewältigung der Herausforderungen, die der Weltbevölkerungstag aufzeigt. Ihr Fachwissen in der Planung, Gestaltung und Verwaltung der bebauten Umwelt ist entscheidend für die Entwickung nachhaltiger und lebenswerter Städte. So setzten Sie Ihre Expertise und Technologien ein, um die Ziele des Weltbevölkerungstags zu erreichen:
- Stadtplanung: Durch die Bereitstellung genauer und umfassender Daten über die bestehende städtische Umgebung hilft das Laserscanning Planern dabei, effizientere und nachhaltigere Städte zu entwerfen.
- Infrastrukturausbau: Vermessungsingenieure können das Laserscanning nutzen, um den Zustand der Infrastruktur zu bewerten. So kann sichergestellt werden, dass neue Entwicklungen nahtlos in bestehende Strukturen integriert werden.


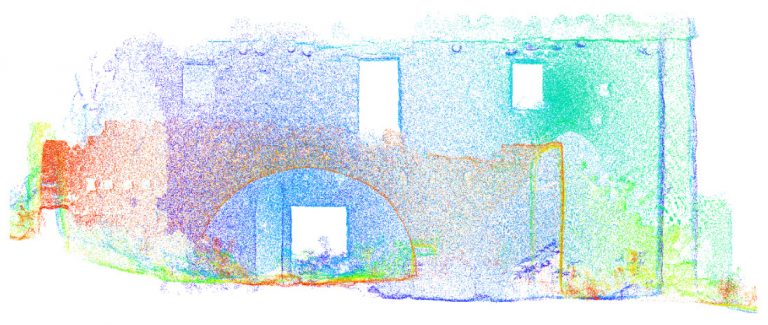
- Denkmalschutz: Durch eine präzise und digitale Dokumentation können historische Stätten besser erhalten und dadurch das kulturellen Erbe bewahrt werden.
- Umweltauswirkungen analysieren: Detaillierte 3D-Modelle helfen bei der Bewertung der Umweltauswirkungen neuer Projekte und unterstützen das Erstellen von Entwürfen, die den ökologischen Fußabdruck minimieren.
- Ressourcenmanagement: Eine genaue Modellierung von Ressourcen wie z.B. Wasservorkommen und Vegetation hilft bei der Planung ihrer nachhaltigen Nutzung und Verwaltung.
Fallstudien und Praxisbeispiele
Smart Cities:
In Städten wie Singapur und Barcelona werden Laserscanning und Punktwolkenverarbeitung zur Erstellung digitaler Zwillinge genutzt – virtuelle Replikate physischer Räume. Diese digitalen Zwillinge helfen bei der Überwachung städtischer Umgebungen, der Optimierung des Energieverbrauchs und der Verbesserung öffentlicher Dienstleistungen.


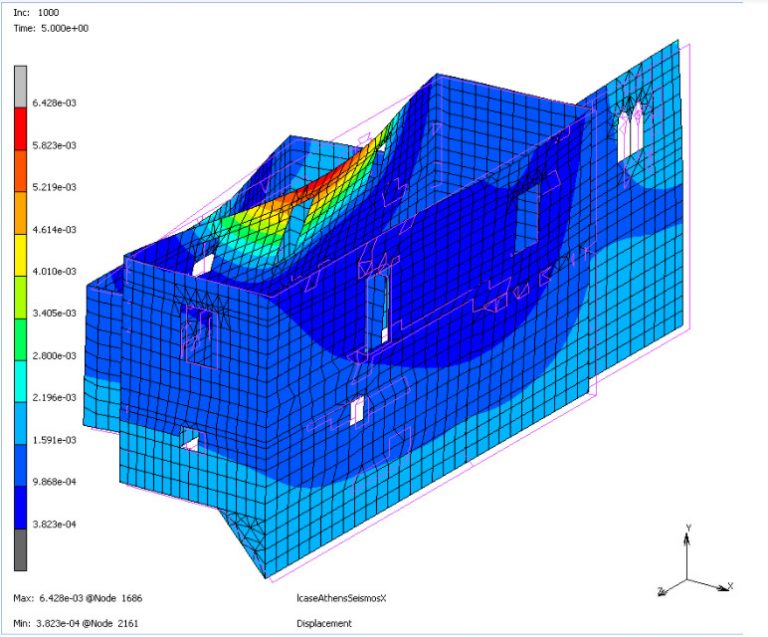
Katastrophenmanagement:
In erdbebengefährdeten Gebieten wie z.B. Japan wird das Laserscanning verwendet, um strukturelle Schäden schnell und genau zu bewerten, was eine rasche Reaktion und Wiederaufbaumaßnahmen ermöglicht.
Nachhaltige Gebäude:
Grüne Bauprojekte, wie das Bullitt Center in Seattle, nutzen diese Technologien, um Gebäude zu entwerfen, die energieeffizient und umweltfreundlich sind und neue Maßstäbe für nachhaltige Architektur setzen.

Fazit
Der Weltbevölkerungstag erinnert an die Herausforderungen, die sich aus einer wachsenden Weltbevölkerung ergeben. Vermessungsingenieure und Architekten, ausgestattet mit fortschrittlichen Technologien wie dem Laserscanning, spielen eine entscheidende Rolle bei der Bewältigung dieser Herausforderungen. Durch die Schaffung nachhaltiger, effizienter und widerstandsfähiger Umgebungen tragen sie erheblich dazu bei, eine bessere Zukunft für alle zu gewährleisten. Während wir den Weltbevölkerungstag begehen, ist es wichtig, die innovativen Lösungen dieser Fachleute anzuerkennen und zu unterstützen, um den komplexen Herausforderungen des Bevölkerungswachstums und der Stadtentwicklung zu begegnen.
Sie möchten immer auf dem neusten stand bleiben?
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!