

USER STORY
Digitales Bauaufmaß im Studium mit Laserscanning: Erste Hürden und echte Aha-Momente

Inhalt
Ein Ensemble als Experimentierfeld
Ein Turm als Übungsobjekt
Scanstrategie vor Ort
Wenn Theorie auf Praxis trifft
Arbeiten in der Punktwolke: Vom Export zur Zeichnung
Datenmanagement und Austausch
Zwischen Anspruch und Realität: Lernkurve
Fazit: Technologie trifft Lernprozess
Unser Tipp für den Einstieg
Projektbeteiligte
Was passiert, wenn angehende ArchitektInnen erstmals mit terrestrischem Laserscanning arbeiten? Im Kurs Bauaufnahme an der Hochschule Koblenz ging es genau darum: weg vom klassischen Aufmaß mit Zollstock, hin zu einem digitalen Verständnis von Bestand.
Das Ergebnis ist kein glattgebügelter Showcase, sondern ein realistischer Einblick in einen Lernprozess, der zeigt, wie viel Potenzial – aber auch wie viel Komplexität – im Scan-to-CAD-Workflow steckt.
Ein Ensemble als Experimentierfeld
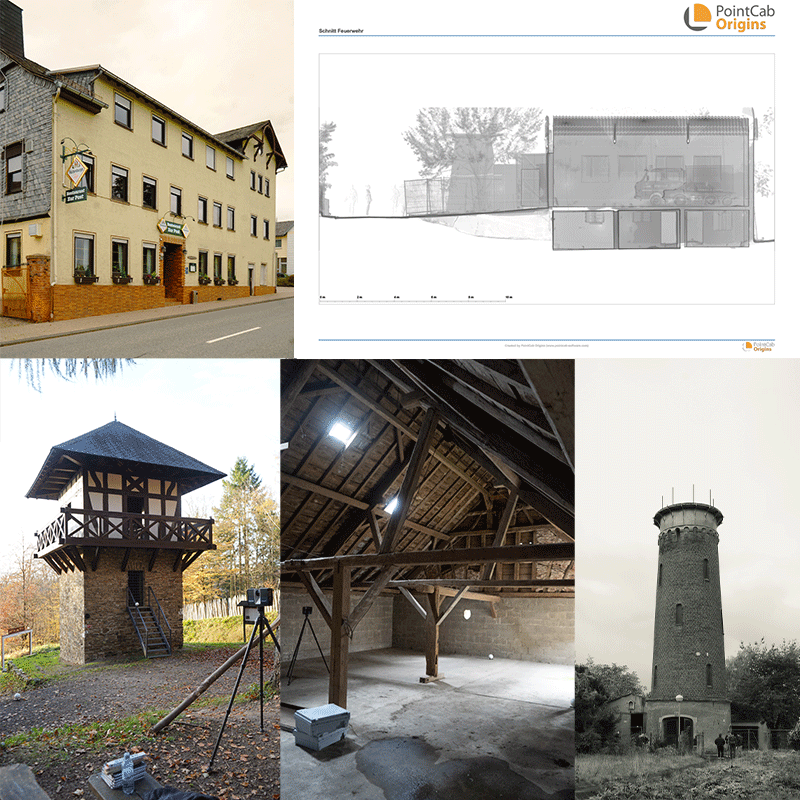
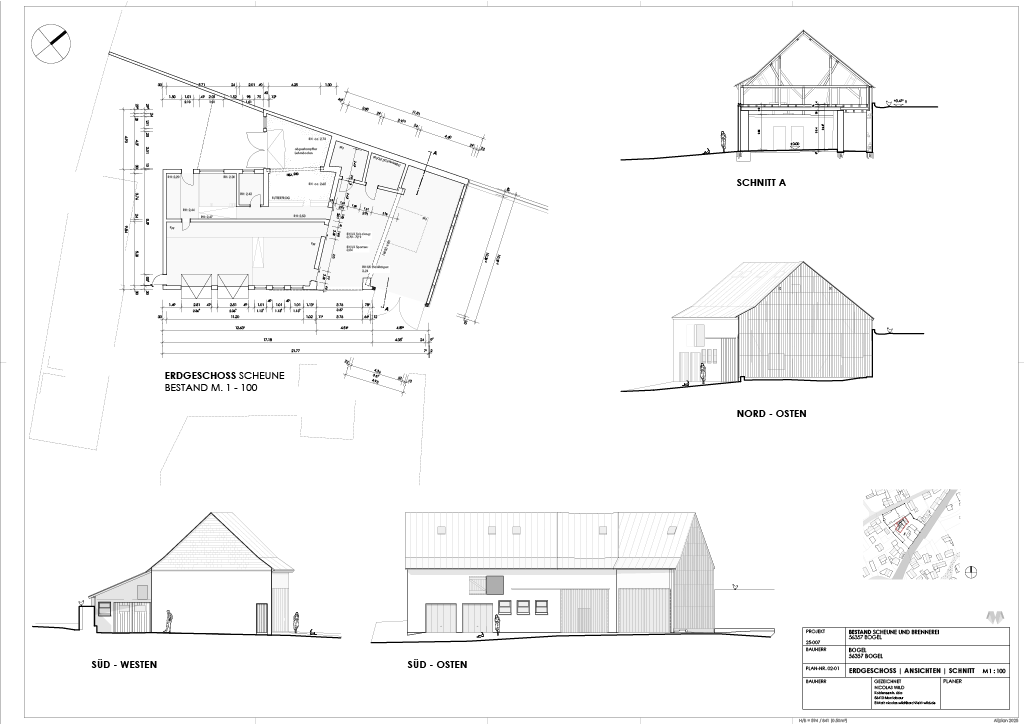
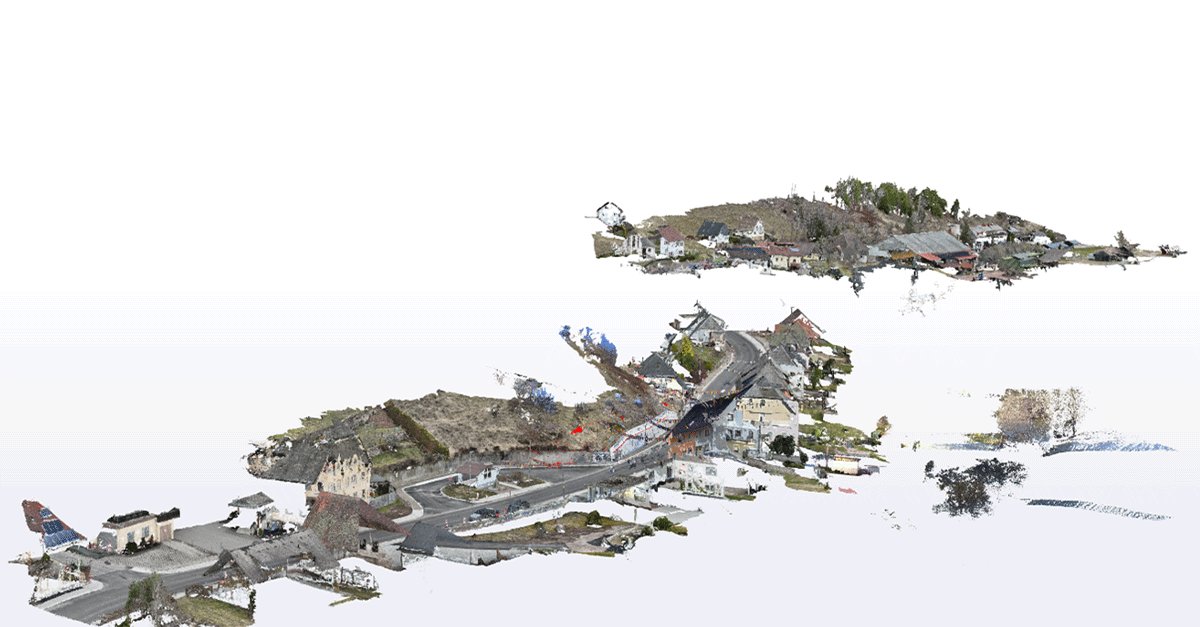
Im Mittelpunkt stand ein heterogenes Gebäudeensemble in der Ortsgemeinde Bogel im Rhein-Lahn-Kreis. Neben der ehemaligen „Alten Post“ wurden auch Scheunen, eine Gaststätte und weitere Bestandsgebäude untersucht.
Die Aufgabenstellung war bewusst offen gehalten: Der Bestand sollte nicht nur erfasst, sondern auch räumlich verstanden werden. Es ging darum, aus den gewonnenen Daten belastbare Planunterlagen zu entwickeln – als Grundlage für spätere Entwurfsprozesse.
Ein Teil der Herausforderung lag bereits im Zugang: Nicht alle Innenräume waren zugänglich. Das bedeutete, dass viele Erkenntnisse indirekt aus Außenaufnahmen abgeleitet werden mussten – etwa Dachgeometrien, Fassadenöffnungen oder Höhenentwicklungen.
Ein Turm als Übungsobjekt
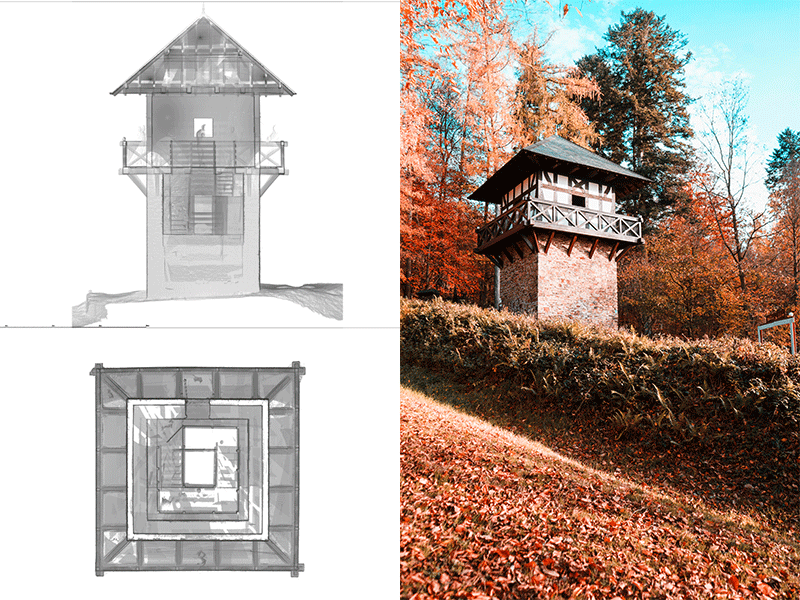
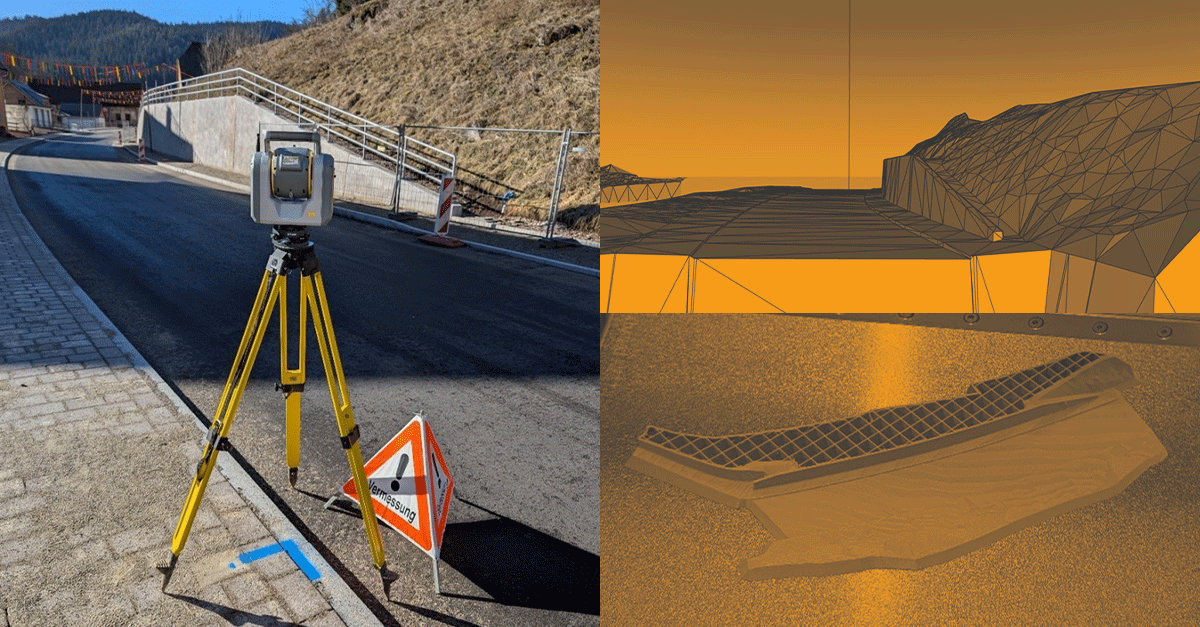
Parallel dazu wurde der rekonstruierte Römerturm am Limes in Bendorf-Sayn gescannt – ein bewusst gewähltes Objekt mit anderen Anforderungen.
Enge Innenräume, komplexe Sichtachsen und ein bewegtes Umfeld machten ihn zum idealen Trainingsfeld. Hier ging es weniger um Planerstellung, sondern um das Verständnis für den Scanprozess selbst:
- Wie positioniert man den Scanner sinnvoll?
- Wann reichen wenige Targets und wann nicht?
- Wie wirken sich Gelände und Perspektive auf die Registrierung aus?
Gerade durch diese Unterschiede wurde klar, dass es „den einen Workflow“ nicht gibt.
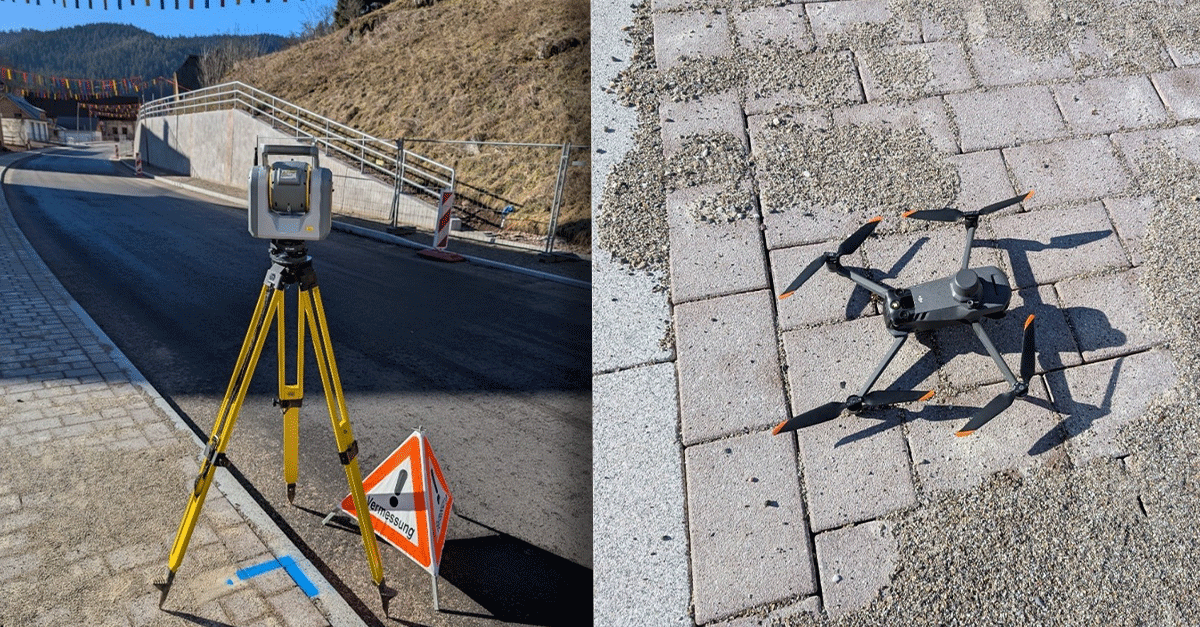
Der erste Schritt entscheidet: Scanstrategie vor Ort

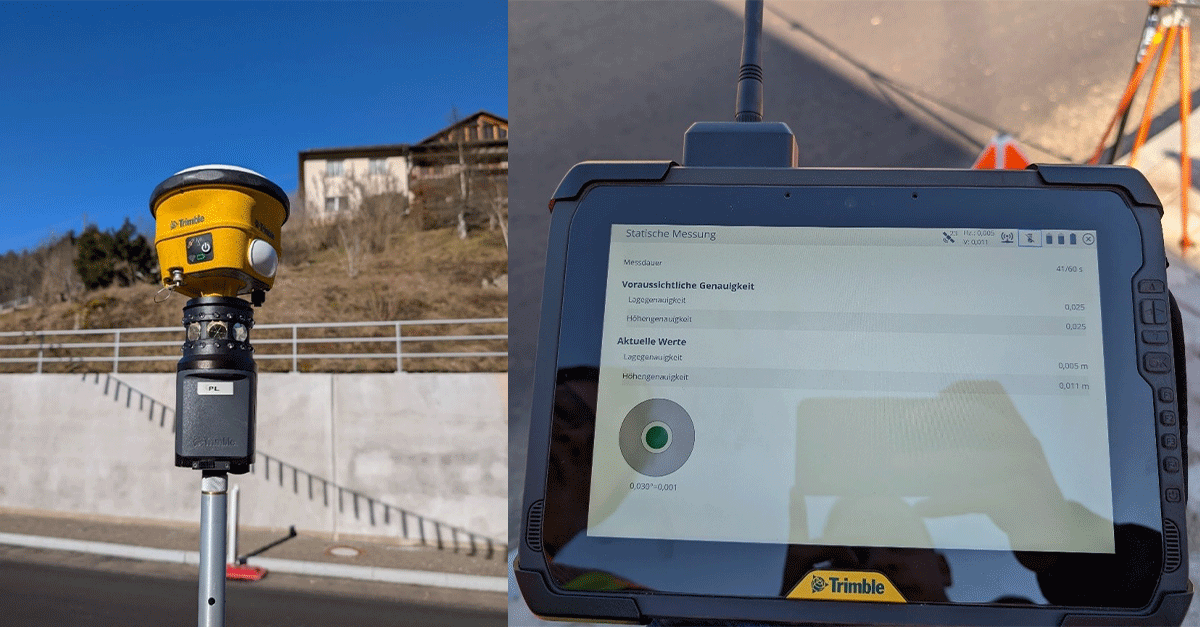
Noch bevor der Scanner überhaupt aufgebaut wurde, zeigte sich, wie entscheidend die Vorbereitung ist.
Die Studierenden mussten Scanpositionen so wählen, dass möglichst wenige Abschattungen entstehen. Gleichzeitig spielte die praktische Umsetzbarkeit eine Rolle: Zugänglichkeit, Zeitdruck und äußere Einflüsse bestimmten den Ablauf stärker als erwartet.
Besonders kritisch war die Platzierung der Referenzkugeln. Sie sollten einerseits gut sichtbar sein, andererseits nicht im Weg stehen – eine scheinbar einfache Aufgabe, die sich in der Praxis als überraschend fehleranfällig erwies.
Wenn Theorie auf Praxis trifft
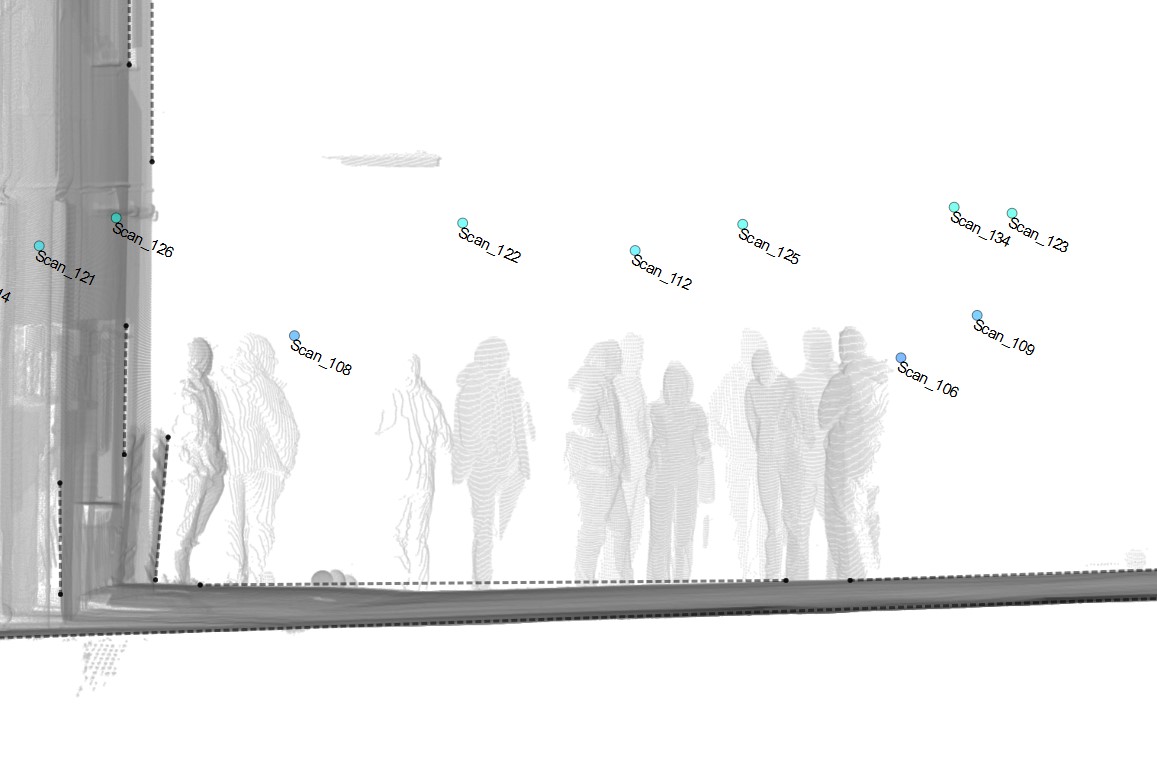
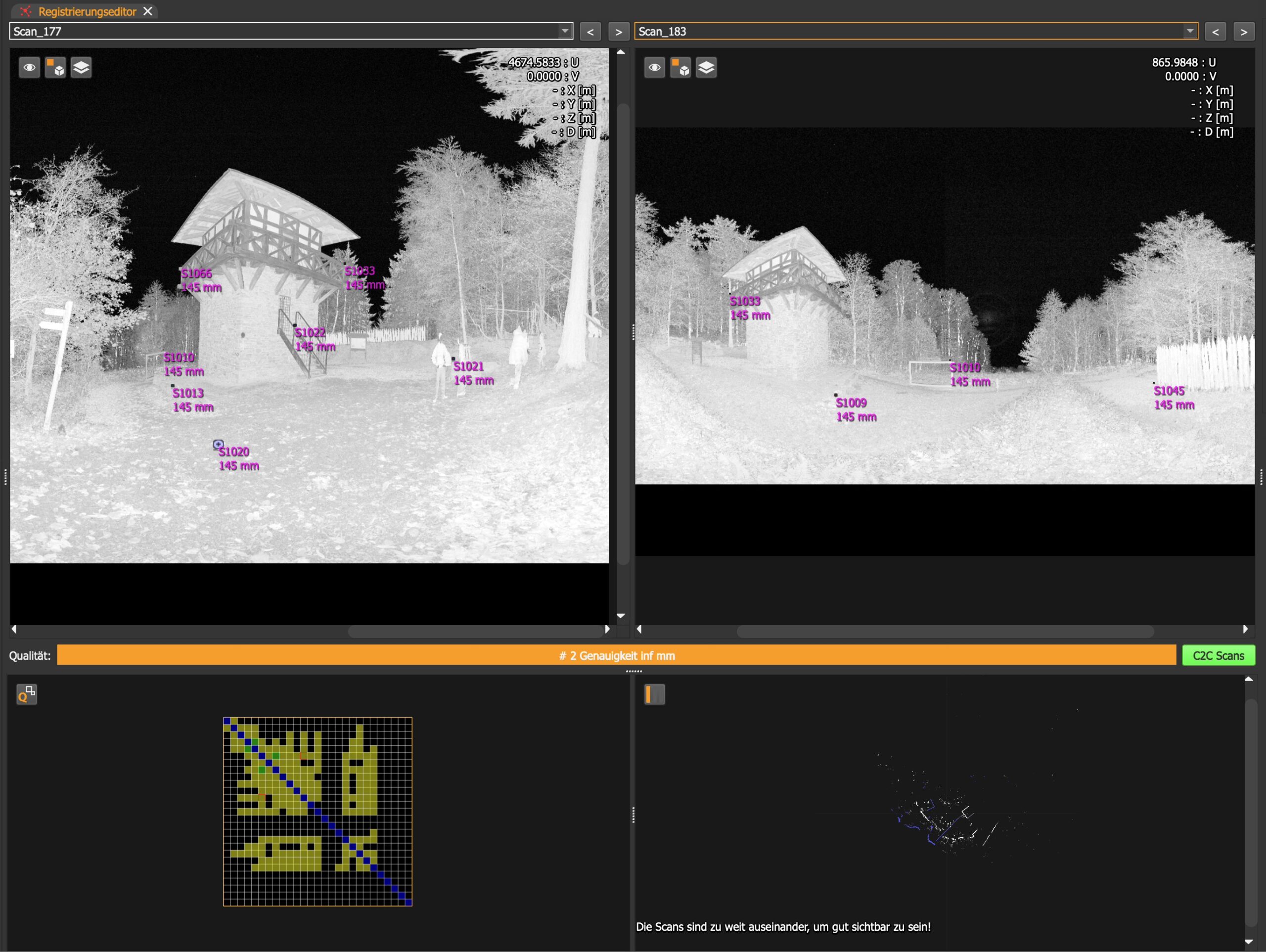
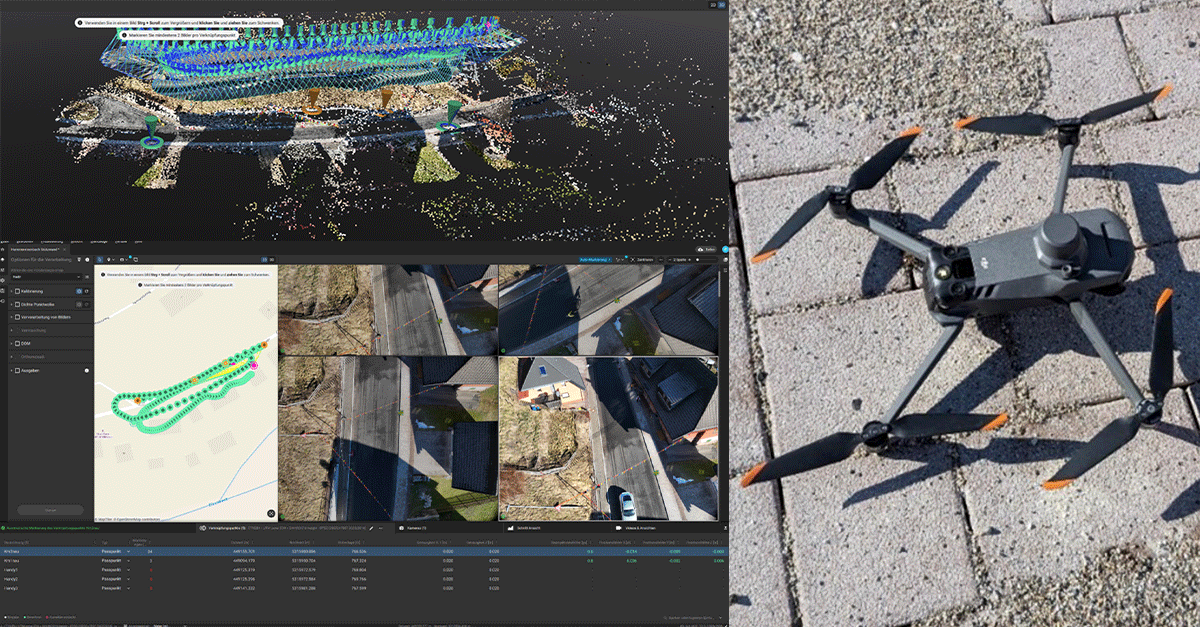
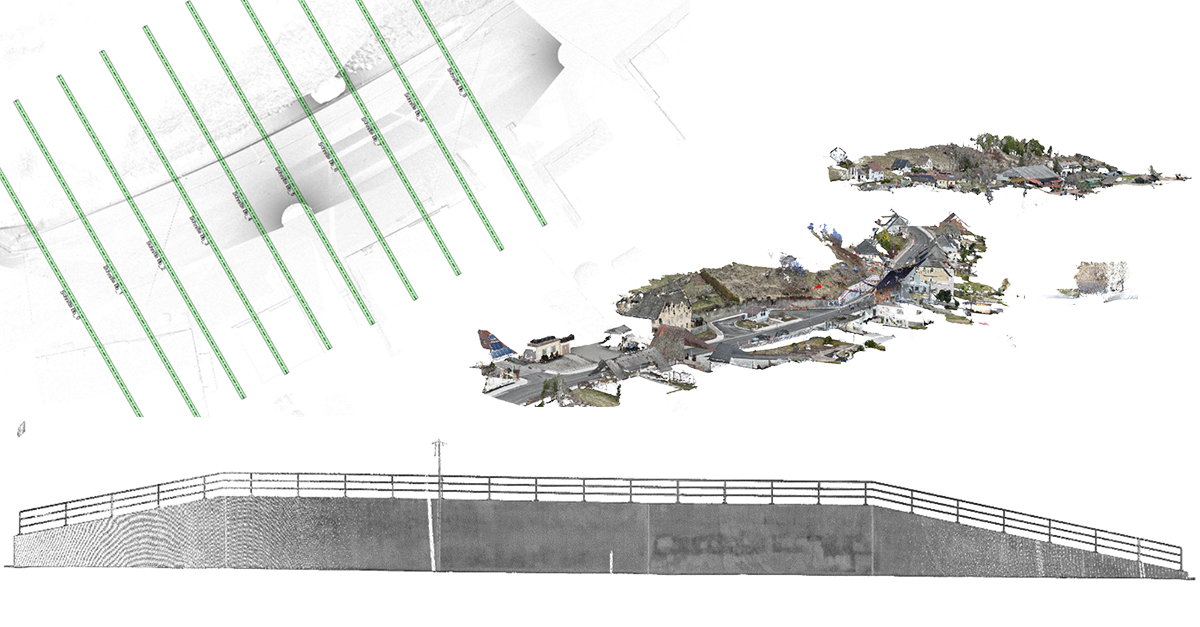
Der Scanprozess selbst verlief technisch zuverlässig – die eigentlichen Herausforderungen entstanden durch äußere Einflüsse und in der anschließenden Verarbeitung. Regen und Wind beeinträchtigten die Aufnahmequalität, während Passanten oder Tiere Referenzkugeln verschoben. In einzelnen Fällen mussten Scans wiederholt werden, da sie sich nicht mehr sauber registrieren ließen.
Die daraus resultierenden Probleme zeigten sich insbesondere bei der Zusammenführung der Einzelscans: Fehlende Verknüpfungen, verschobene Targets oder unvollständige Rundgänge machten die Registrierung deutlich aufwendiger als erwartet. Zusätzlich mussten typische Artefakte – etwa Personen im Scan oder fehlerhafte Referenzpunkte – manuell bereinigt werden, bevor eine konsistente Punktwolke entstand.
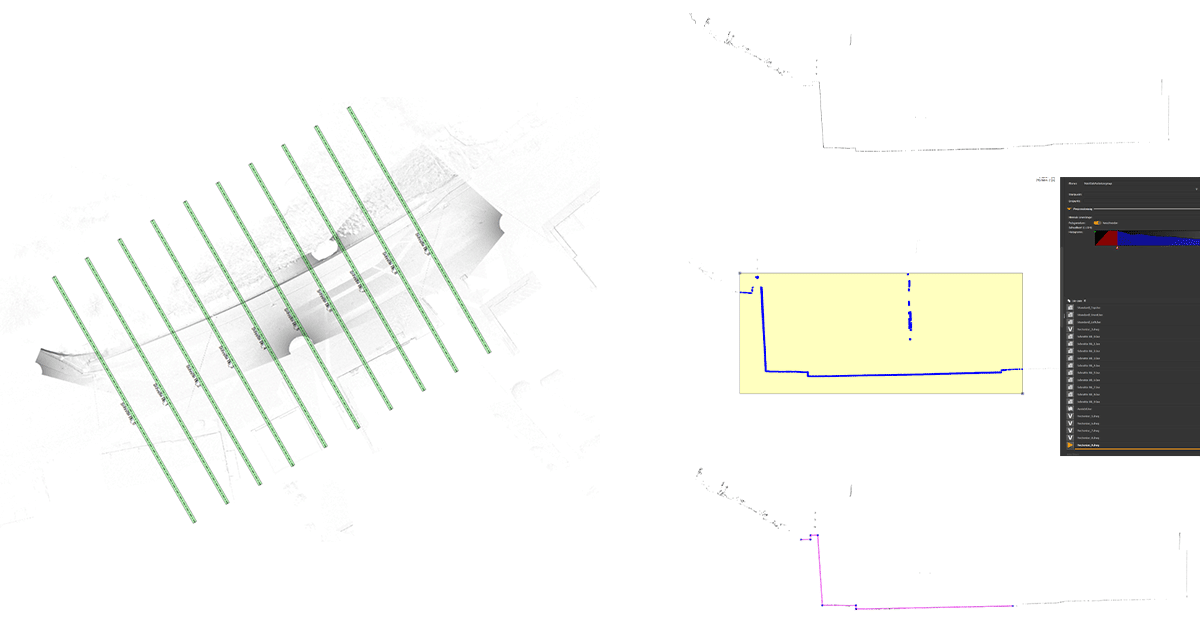
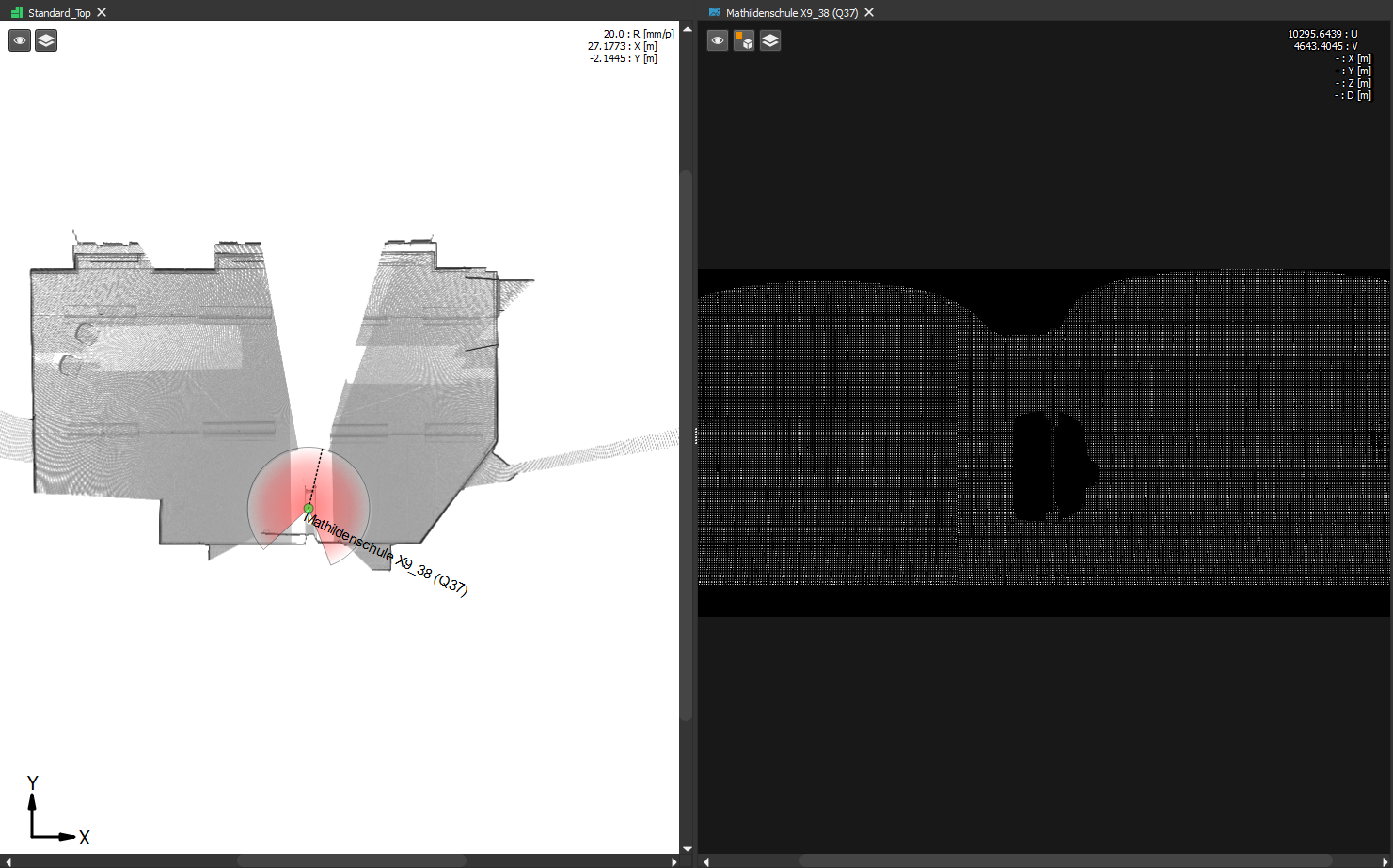
Arbeiten in der Punktwolke: Vom Export zur Zeichnung
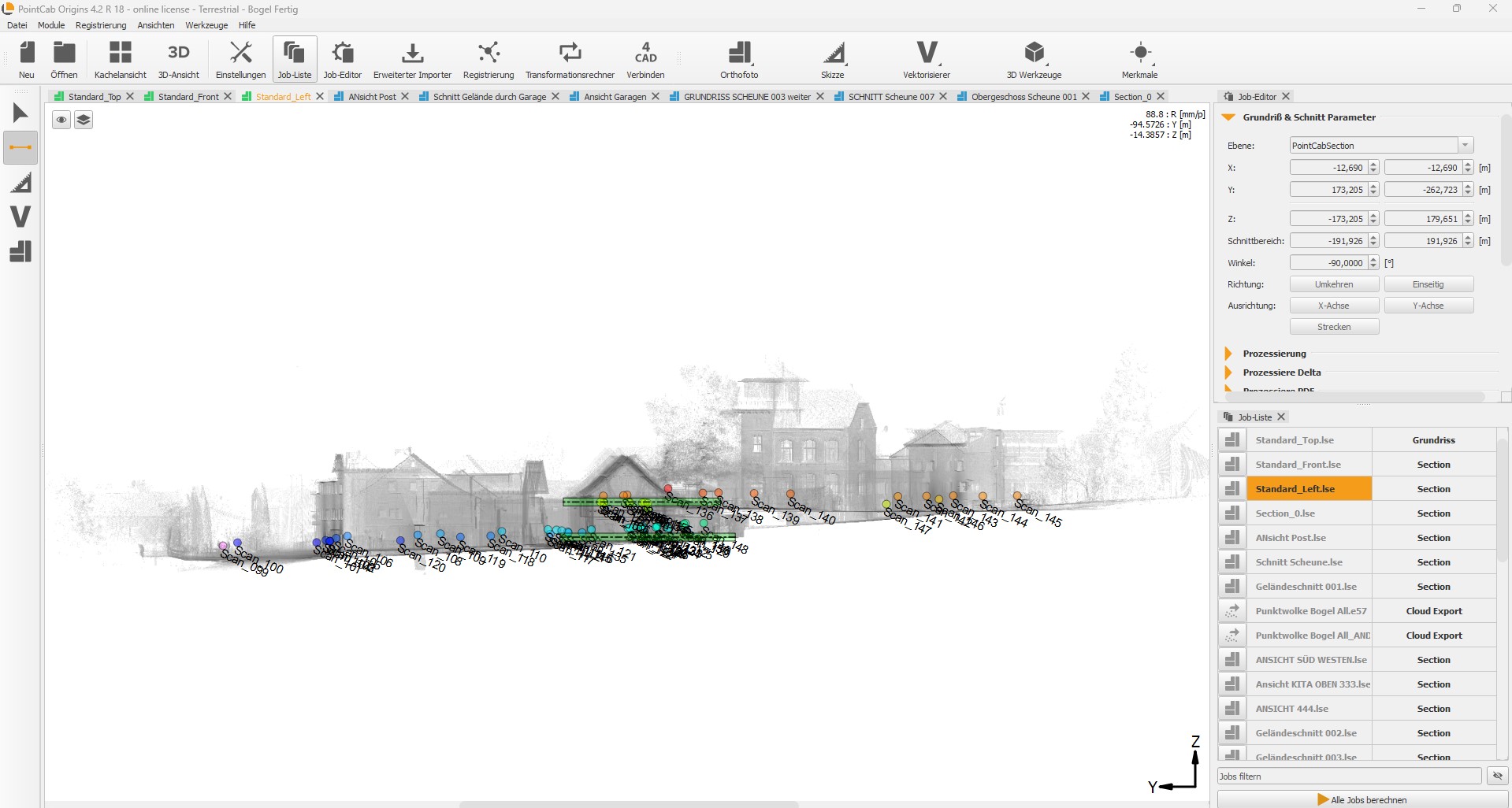
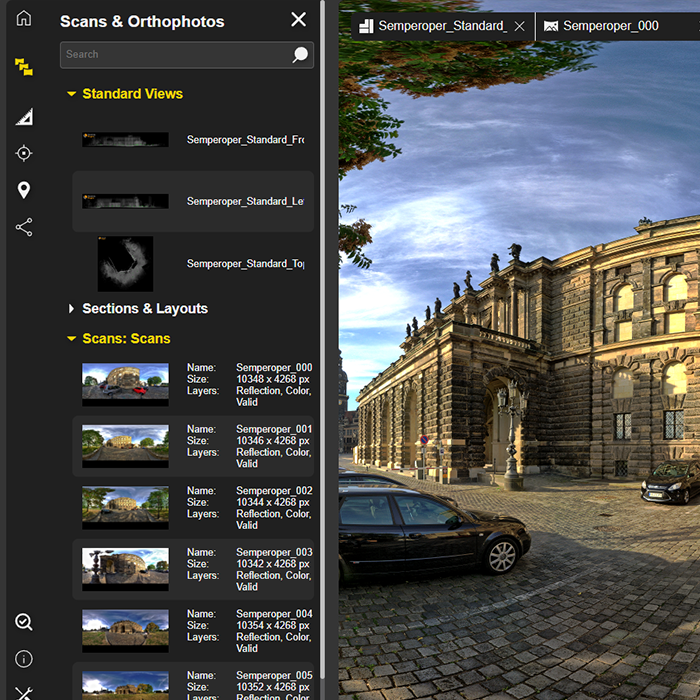
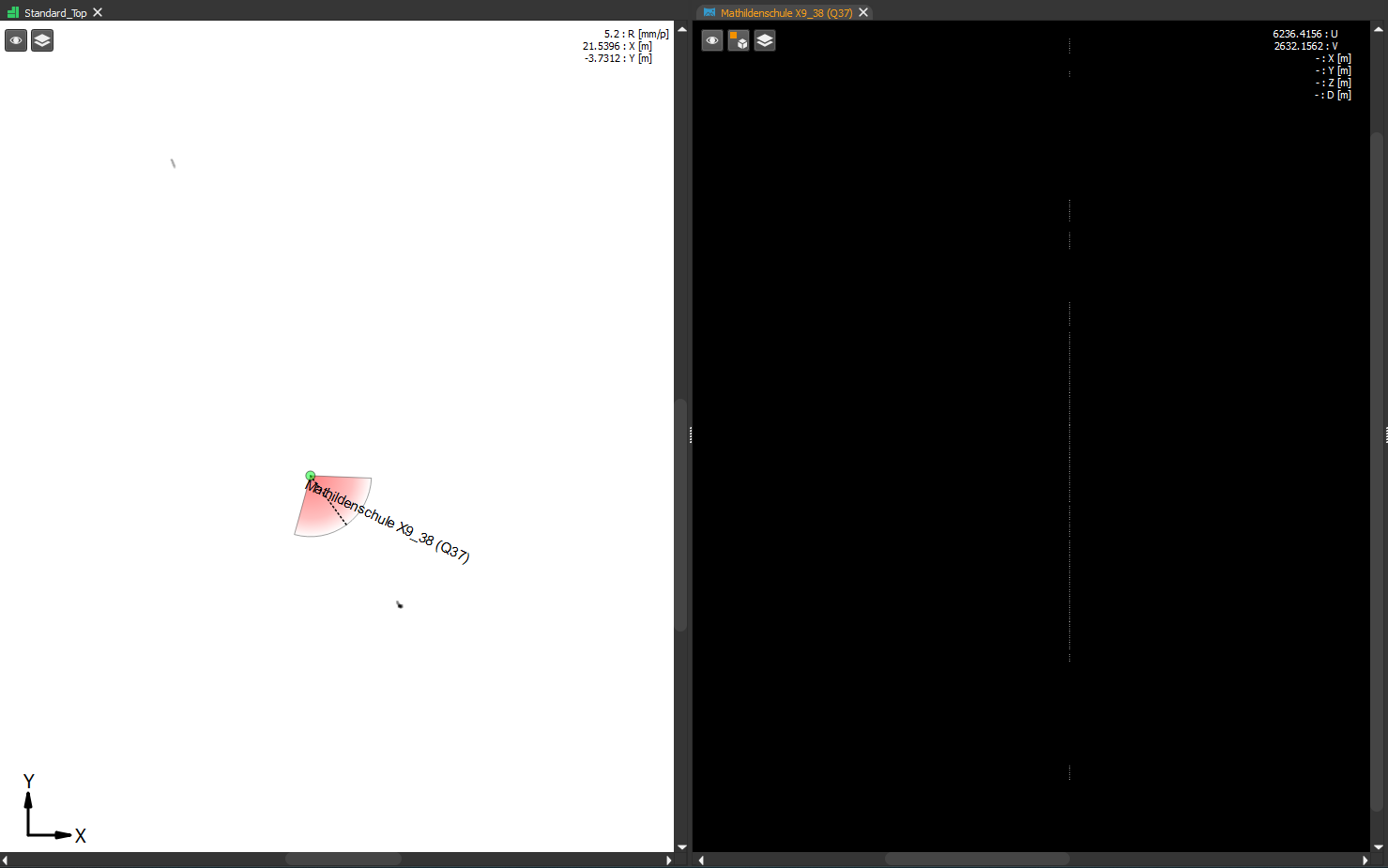
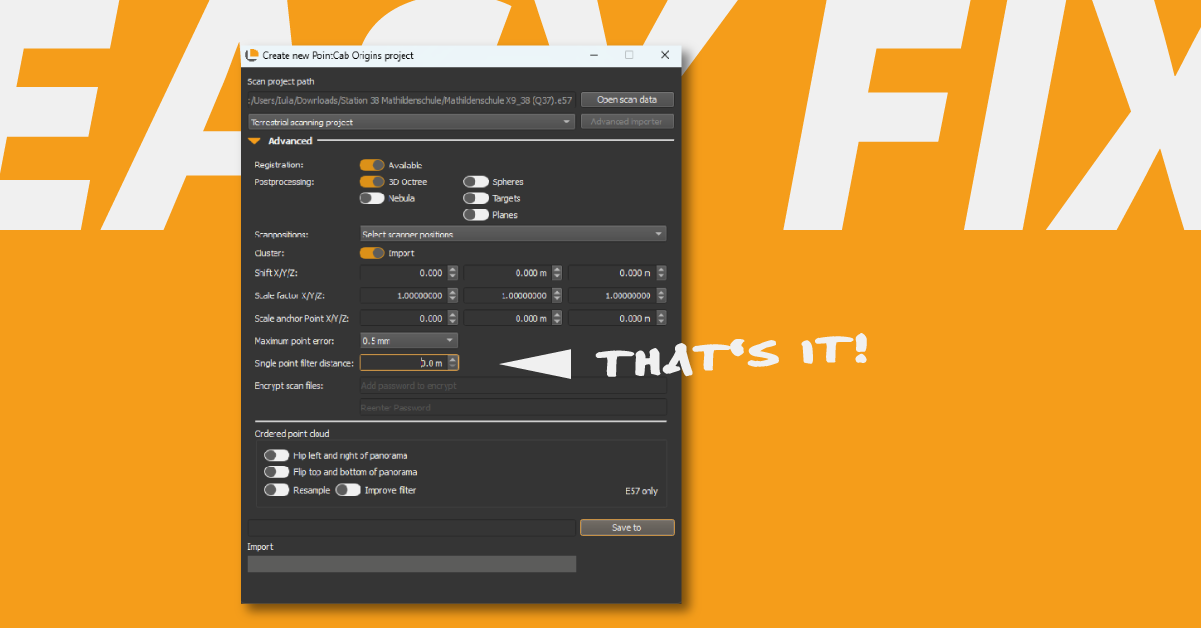
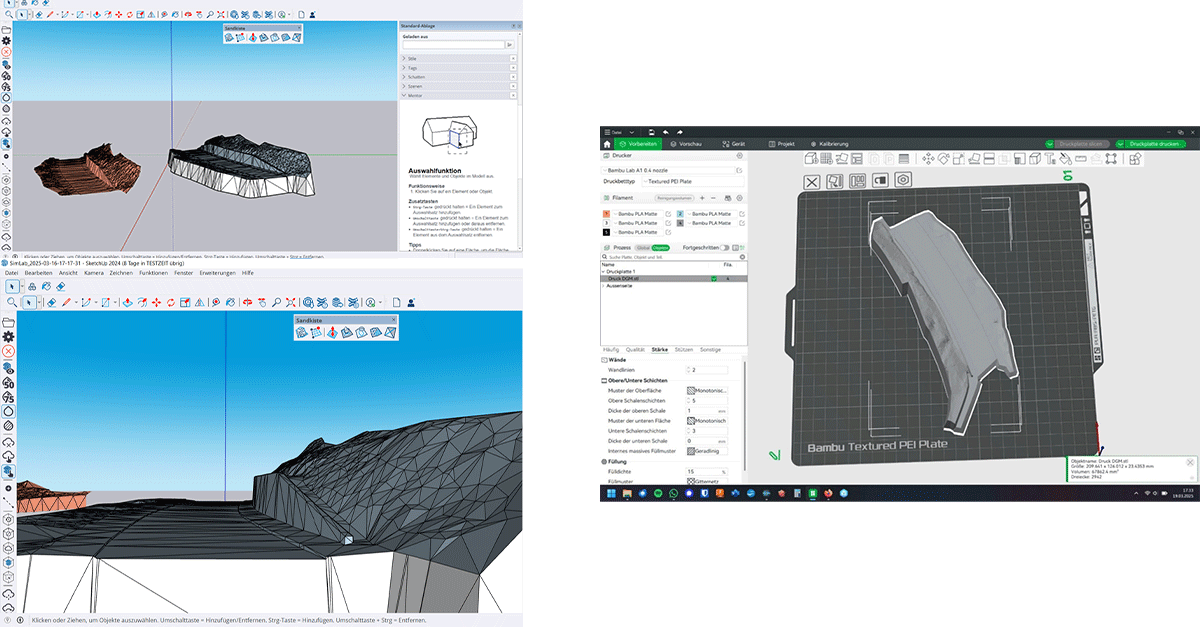
Mit der fertigen Punktwolke begann die eigentliche Auswertung in PointCab Origins. Hier konnten die Studierenden erstmals direkt im digitalen Bestand arbeiten: messen, Schnitte erzeugen, Grundrisse ableiten. Besonders hilfreich war die Möglichkeit, jederzeit auf die vollständige Geometrie zugreifen zu können – ein klarer Vorteil gegenüber klassischen Methoden.
Leider wurde erst im Nachhinein deutlich, dass der tatsächliche Funktionsumfang von PointCab Origins nur teilweise ausgeschöpft wurde. Das manuelle Nachzeichnen der PDFs im CAD-Programm war sehr zeitintensiv. Eine Vektorausgabe über Origins wurde erprobt, jedoch aus Zeitgründen nicht weiterverfolgt. Wie die Studenten erst später über die Tutorials lernten, wäre der Einsatz des Vectorizer-Tools oder zumindest der lagerichtige Import von Orthophotos wahrscheinlich wesentlich effizienter gewesen.
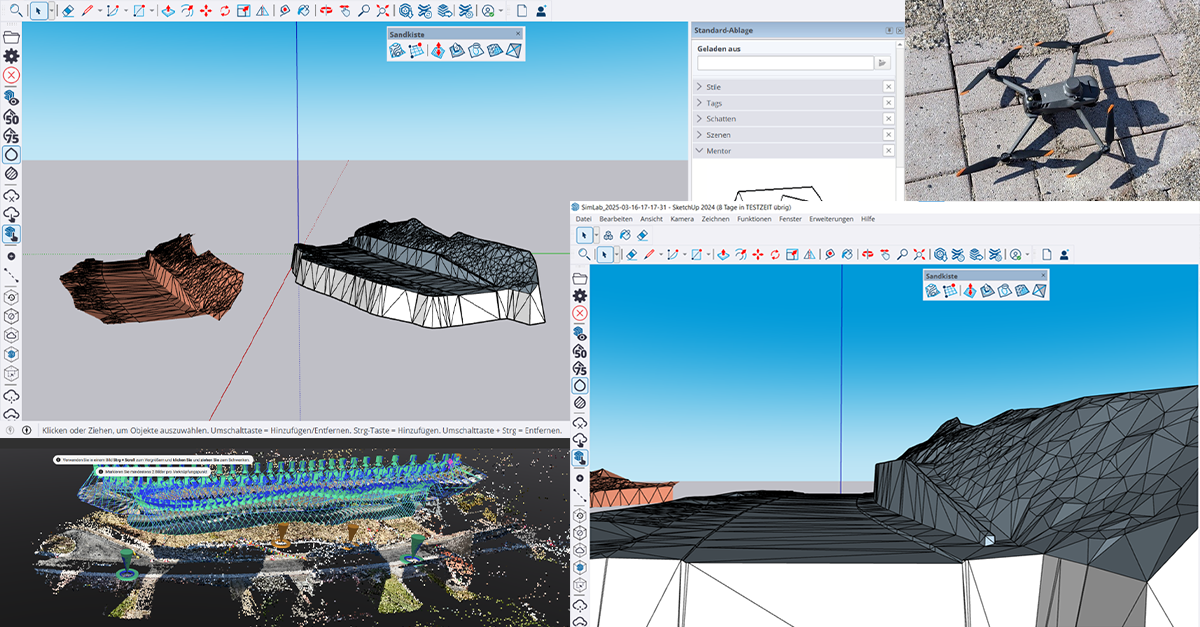
Die exportierten Daten wurden stattdessen aufbereitet, skaliert und im CAD-System weiterverarbeitet. Teilweise traten Maßstabsprobleme auf, die zunächst falsch interpretiert wurden. Auch hier stellte sich erst später heraus, dass diese bereits beim Export hätten vermieden werden können. Die Anpassung des Blattformats in PointCab Origins ermöglicht nämlich problemlos eine maßstäbliche PDF-Ausgabe.
Genau hier zeigt sich ein typischer Einstiegseffekt: Wer die Möglichkeiten seiner Software noch nicht vollständig kennt, baut sich schnell unnötig komplexe Workflows.
Der unterschätzte Faktor: Datenmanagement und Austausch
Ein weiterer kritischer Punkt waren die produzierten Datenmengen.
Die erzeugten Punktwolken waren sehr groß und ließen sich nicht ohne Weiteres teilen. Klassische Wege wie E-Mail oder andere Dienste stießen schnell an ihre Grenzen (z. B. 2-GB-Limits), sodass teilweise externe Festplatten genutzt werden mussten.
Gerade bei kollaborativen Projekten wird hier ein zentrales Problem sichtbar:
Der eigentliche Mehrwert der Daten kann nur dann genutzt werden, wenn sie effizient zugänglich sind und die richtige Hardware verwendet wird.
An dieser Stelle bieten cloudbasierte Lösungen wie PointCab Nebula einen deutlich schlankeren Ansatz: Projekte können direkt in der eigenen Cloud gehostet, visualisiert und geteilt werden – ohne aufwendigen Datentransfer oder Versionsprobleme.
Zwischen Anspruch und Realität: eine steile Lernkurve
Die anfängliche Erwartung, innerhalb kurzer Zeit vollständige Bestandspläne zu erstellen, erwies sich als zu optimistisch.
Stattdessen entwickelte sich das Projekt zu einem iterativen Prozess: Scannen, korrigieren, neu auswerten, nachzeichnen. Genau darin liegt jedoch der eigentliche Lernwert: Die Studierenden haben nicht nur den Workflow kennengelernt, sondern auch verstanden, wo typische Fehler entstehen und wie man sie künftig vermeidet.
Wichtige Learnings waren unter anderem:
- bessere Planung der Scanpositionen
- sorgfältigere Sicherung der Referenzkugeln
- effizientere Nutzung der Software
- realistischere Einschätzung von Datenmengen und Hardwareanforderungen
Fazit: Technologie trifft Lernprozess

Das Projekt zeigt eindrucksvoll, wie groß das Potenzial digitaler Bauaufnahme ist.
Nicolas Wild formuliert es so:
„Obwohl terrestrisches Laserscanning seinen Ursprung in der Landschaftsvermessung hat, lässt sich die Methode sinnvoll auf das Bauaufmaß übertragen: Sie liefert eine vollständige geometrische Erfassung des Bestands und eröffnet gegenüber dem händischen Aufmaß zusätzliche Auswertungsmöglichkeiten im Planungsprozess. Die Investition in Scanner und Software stellt zunächst eine Hürde dar, kann sich jedoch mit wachsender Erfahrung und der Bearbeitung mehrerer Projekte bezahlt machen.“
Es wird klar:
Der Schlüssel liegt nicht nur in der Technologie, sondern im Verständnis des Workflows. Mit dem Wissen aus diesem Projekt sind die Studenten für ihren nächsten Durchlauf deutlich besser aufgestellt. Denn wer diese ersten Projekte durchläuft, entwickelt ein realistisches Verständnis für den gesamten Scan-to-CAD-Prozess – und genau das ist die Grundlage für effiziente Workflows in späteren Projekten.
Unser Tipp für den Einstieg
Viele der Herausforderungen im Projekt lassen sich deutlich reduzieren, wenn man die Möglichkeiten der Software von Anfang an kennt.
Deshalb empfehlen wir:
- kostenlose Demos, um den Funktionsumfang von PointCab Origins kennenzulernen
- gezielten Support, um typische Fehler frühzeitig zu vermeiden
- und Cloud-Lösungen wie PointCab Nebula, um Daten einfach zu teilen und Projekte effizient zu organisieren
So wird aus einem komplexen Einstieg ein deutlich strukturierterer Workflow – und das volle Potenzial von Laserscanning kann genutzt werden.

Projektbeteiligte
Studierende:
Celina Harzer, David Knopp, Maximilian Krahn, Edgar Landl, Witta Majorov, Nicolas Wild
Dozent:
Prof. Stephan Jost
Betreuer:
Mika Kramer
Weitere Veröffentlichungen:
Nicolas Wild – Büro Stefan Wild Architekt Montabaur
Quellen & weitere Informationen:
– Hochschule Koblenz
– Welterbe Limes Bendorf-Sayn
Sie wollen immer auf dem neusten stand bleiben?
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!















{kind=link}
{kind=link}
{kind=link}