

Neues Release: Nebula 2.1 & Nebula Creator

1. Nebula Creator
Nutzen & Mehrwert
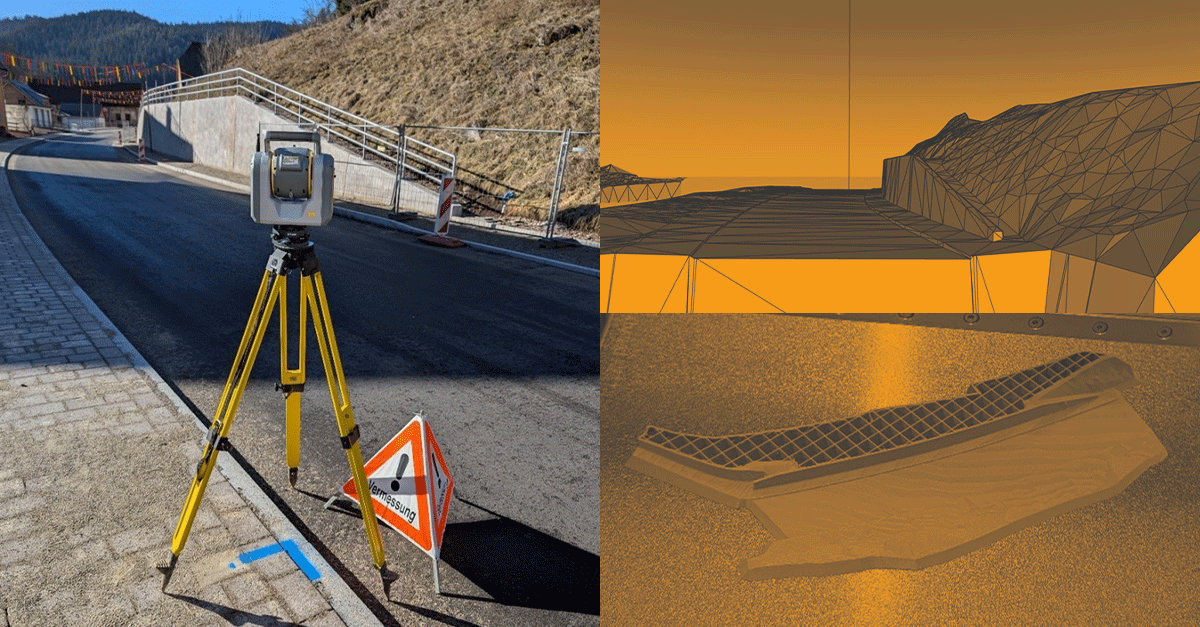
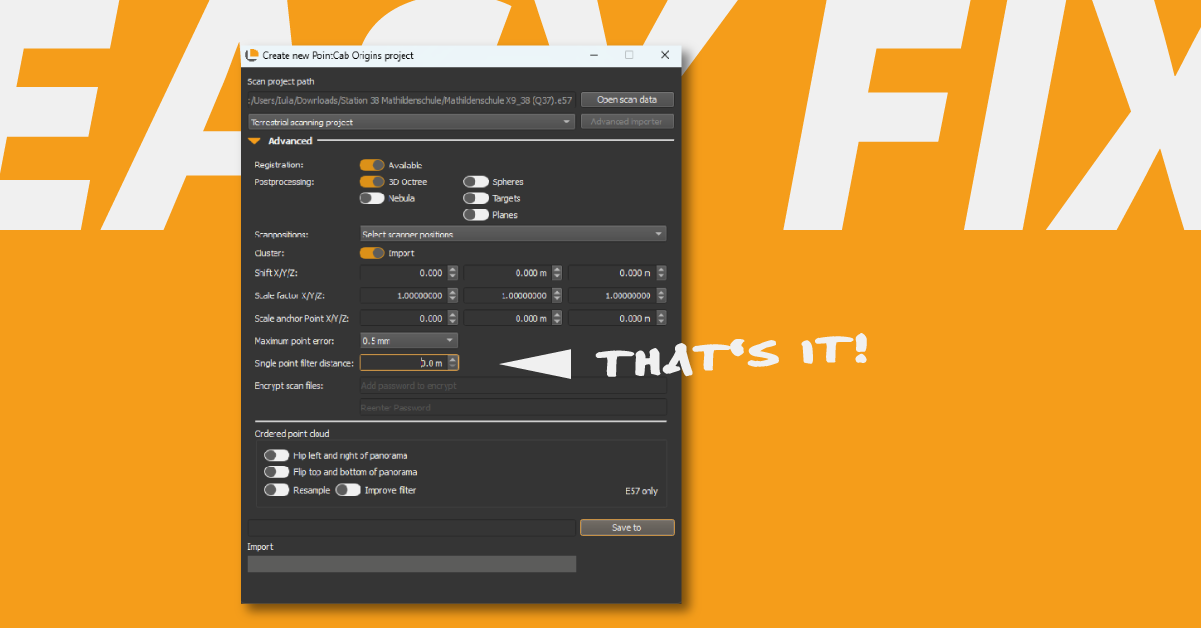
Mit dem Nebula Creator haben jetzt endlich ALLE die Möglichkeit Nebula kostenlos zu nutzen – egal ob Origins bereits eingesetzt wird oder nicht. Der Creator ist ein kostenloses Desktop-Tool mit dem Punktwolkenprojekte für die Online-Visualisierung in Nebula vorbereitet werden.
So funktioniert’s
Creator herunterladen. Punktwolken-Daten konvertieren und ggf. Panos hinzufügen. Danach ganz normal dem Nebula Worklow folgen. Fertig!
2. Nebula 2.1 – Die wichtigsten neuen Funktionen
Kompatibilität mit AWS (Amazon Web Services)
Nutzen & Mehrwert
Wie versprochen erweitern wir die Anzahl an Clouds, die sich mit Nebula verbinden lassen. Auf Grund der großen Nachfrage haben wir mit diesem Update AWS angebunden.
So funktioniert’s
Im Video zeigen wir Schritt für Schritt, wie man seine AWS auch ohne großes IT-Wissen mit Nebula verbindet. Die Kurzfassung? Einfach den Anweisungen in Nebula folgen.
Neuer Download Manager
Nutzen & Mehrwert
Unser neuer Downloadmanager ermöglicht es nun Orthofotos und 3D Punkte direkt im Browser herunterzuladen – eine lang erwartete Funktion. So können sie Ergebnisse nicht nur visualisieren sondern auch direkt und einfach weitergeben.
So funktioniert’s
Download-Manager im Menü unten links anklicken. Im neuen Fenster gewünschte Orthofotos oder 3D Punkte anwählen. Über „ALL“ lassen sich direkt alle verfügbaren Dateien anwählen. Zuletzt einfach auf Download klicken – fertig.
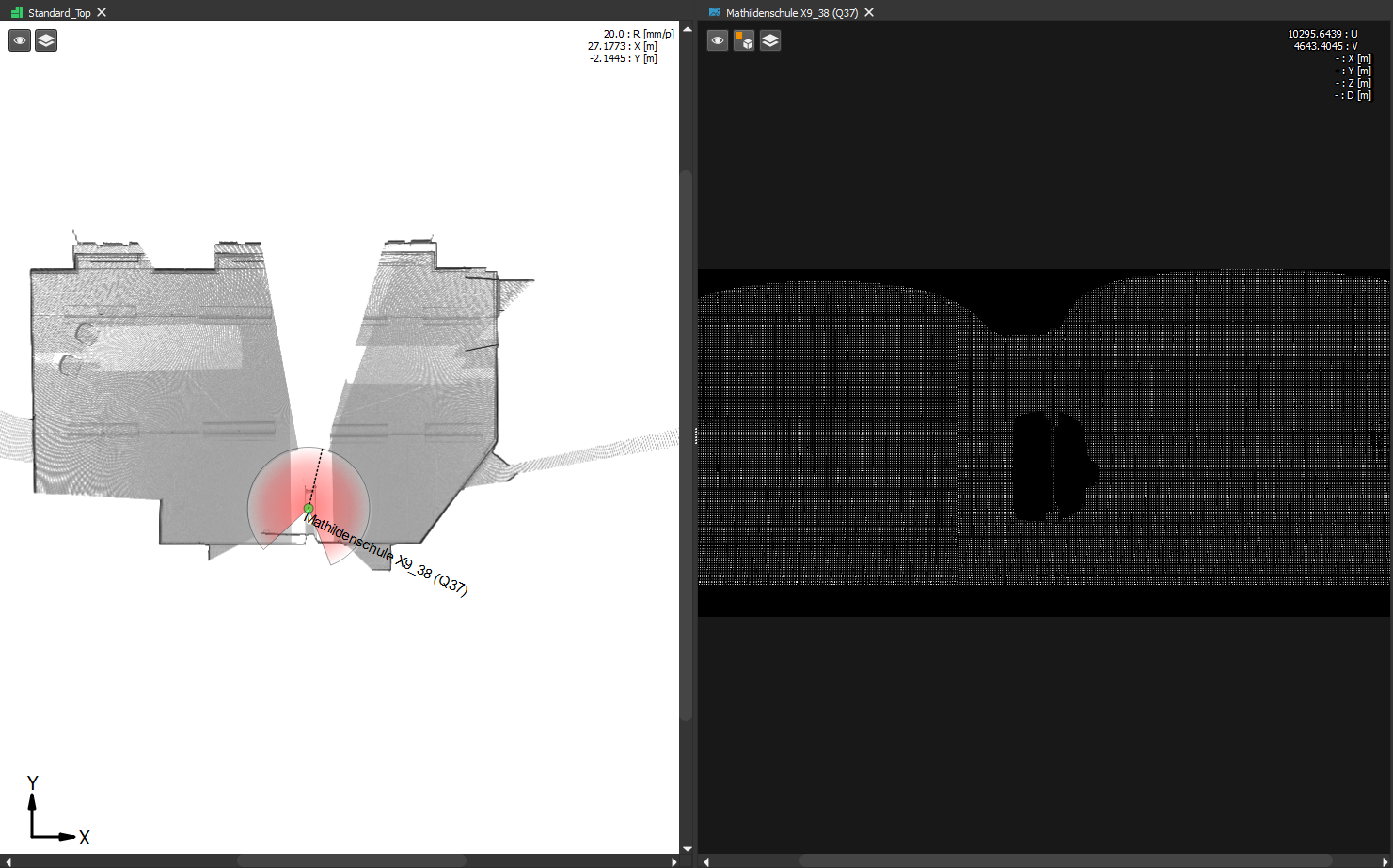
Höhen- und Cluster Navigation
Nutzen & Mehrwert
Damit die Navigation in Nebula noch intuitiver funktioniert, können Scanpositionen jetzt nach Höhe oder Cluster gefiltert und angezeigt werden.
So funktioniert’s
Im Video gibt’s eine ausführliche Anleitung. Die Kurzfassung? Einfach nach Höhe oder Cluster filtern und dann Scanpositionen nach belieben ein- oder ausblenden.
"Display Range" Option in Bubble Views
Nutzen & Mehrwert
Die perfekte Eränzung zur neuen Höhen- und Cluster-Navigation! Die „Display Range“ Funktion bietet die Möglichkeit Scanpositionen in Bezug auf die Entferung zum eigenen Standpunkt im Bubble View ein- oder auszublenden.
So funktioniert’s
Einfach im Menü oben rechts auswählen, ab welcher Entfernung Scanpositionen angezeigt werden sollen.
Messungen & POIs im Bubble Views
Nutzen & Mehrwert
Eine weitere tolle Funktion für den Bubble View. Jetzt können auch im Bubble View Messungen erstellt und POIs werden!
So funktioniert’s
Schnell die Koordinaten herunterladen und schon können per Strg + Mausklick Strecken und 3D Punkte gemessen werden. Natürlich können auch POIs mit z.B. weiteren Links und Dokumentation hinterlegt werden.
3. Nebula 2.1 – Weitere Neuerungen
4. Nebula 2.1 – Verbesserungen und Fixes
- Verbesserte Handhabung der Clipping-Box
- Verbessertes Verhalten und Erscheinungsbild der Einstellungen
- Verbesserter Workflow für den Kauf zusätzlicher Slots
- Verbesserte 3D-Visualisierung
- Verbesserte Mini-Map für einfachere Navigation
- Erweiterte Maßeinheiten (Fuß)
- Dynamische Anpassung der Punktanzeige für verbesserte Leistung
- Optimiertes Laden der Punktwolke für schnellere Leistung
- Fix: Änderungen werden in Echtzeit synchronisiert
- Fix: Einheitliche Freigabelinks für alle Benutzer
- Fix: Automatische Aktualisierung von public Links
- Fix: Public Links in Microsoft SharePoint
- Fix: Probleme mit der Seitenleiste in Firefox
Heute noch Demo buchen
Möchten Sie diese neuen Funktionen besser kennenlernen?
Buchen Sie einfach eine kostenlose, unverbindliche Demo mit einem unserer Support-Engineers.
Sie wollen immer auf dem neusten stand bleiben?
Dann folgen Sie uns auf Social Media oder abonnieren Sie unseren Newsletter!
















{kind=link}
{kind=link}
{kind=link}